 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic 3D Ultrasound Segmentation of Uterus Using Deep Learning
Sep 20, 2021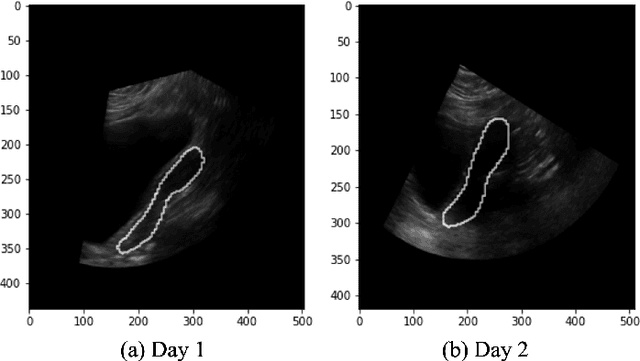
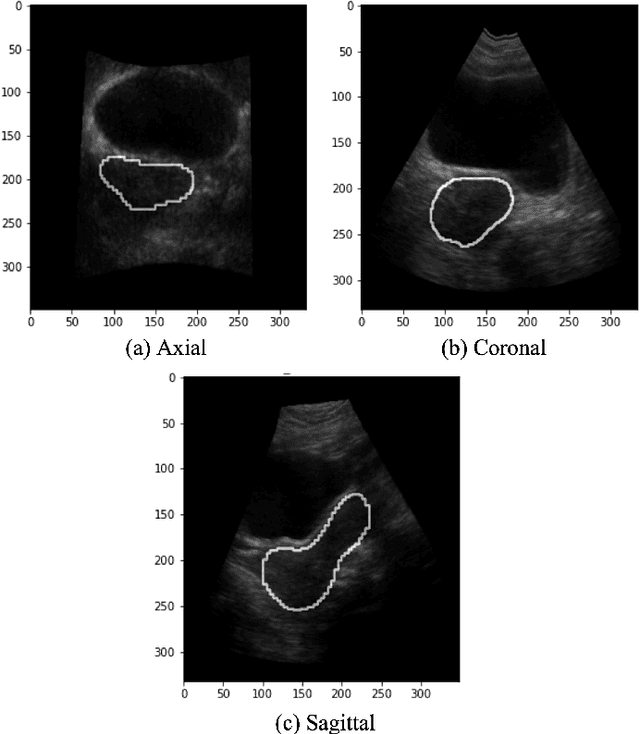
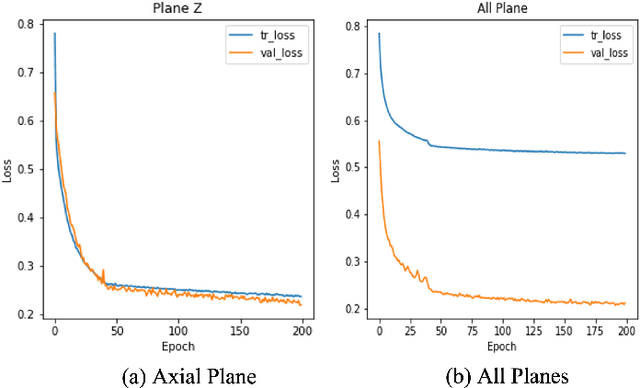
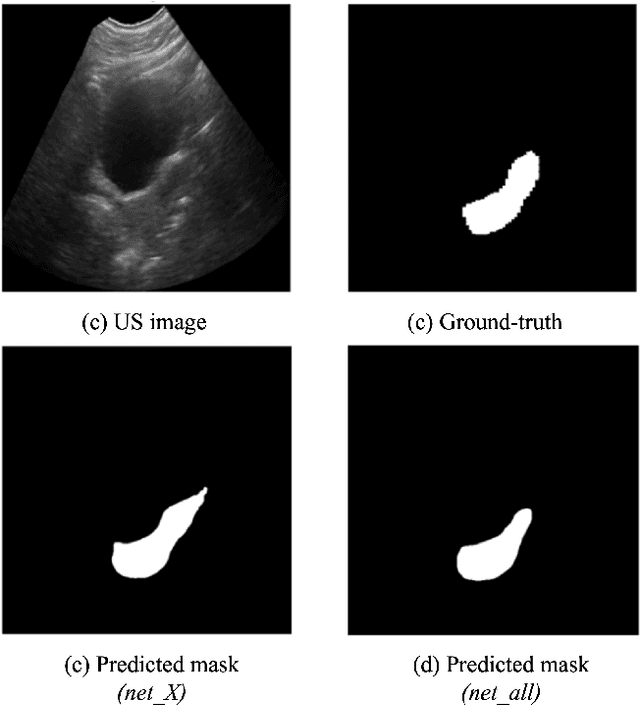
On-line segmentation of the uterus can aid effective image-based guidance for precise delivery of dose to the target tissue (the uterocervix) during cervix cancer radiotherapy. 3D ultrasound (US) can be used to image the uterus, however, finding the position of uterine boundary in US images is a challenging task due to large daily positional and shape changes in the uterus, large variation in bladder filling, and the limitations of 3D US images such as low resolution in the elevational direction and imaging aberrations. Previous studies on uterus segmentation mainly focused on developing semi-automatic algorithms where require manual initialization to be done by an expert clinician. Due to limited studies on the automatic 3D uterus segmentation, the aim of the current study was to overcome the need for manual initialization in the semi-automatic algorithms using the recent deep learning-based algorithms. Therefore, we developed 2D UNet-based networks that are trained based on two scenarios. In the first scenario, we trained 3 different networks on each plane (i.e., sagittal, coronal, axial) individually. In the second scenario, our proposed network was trained using all the planes of each 3D volume. Our proposed schematic can overcome the initial manual selection of previous semi-automatic algorithm.
Assisted Probe Positioning for Ultrasound Guided Radiotherapy Using Image Sequence Classification
Oct 06, 2020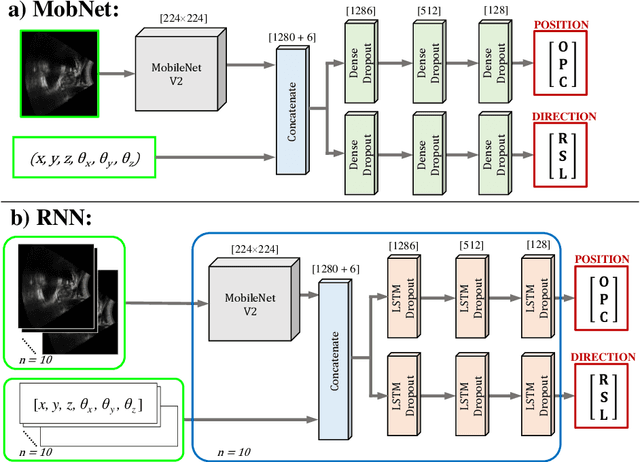
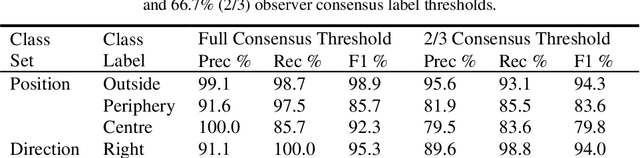
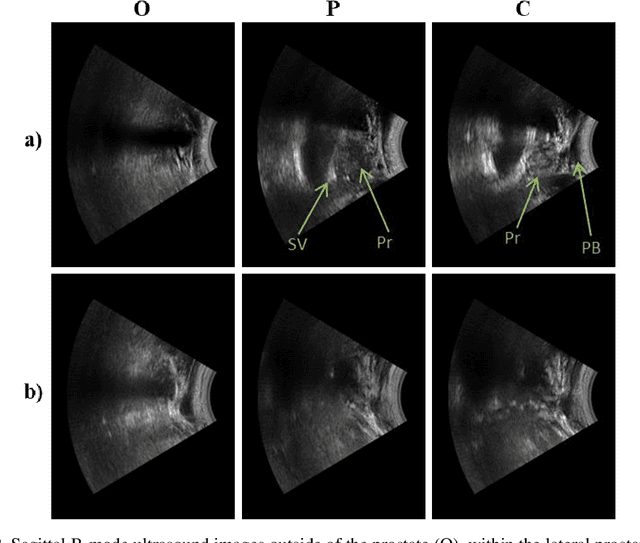
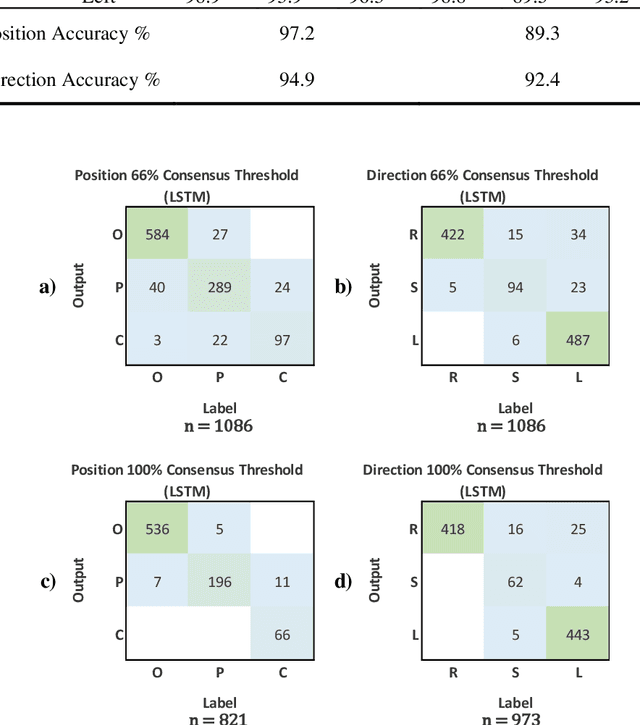
Effective transperineal ultrasound image guidance in prostate external beam radiotherapy requires consistent alignment between probe and prostate at each session during patient set-up. Probe placement and ultrasound image inter-pretation are manual tasks contingent upon operator skill, leading to interoperator uncertainties that degrade radiotherapy precision. We demonstrate a method for ensuring accurate probe placement through joint classification of images and probe position data. Using a multi-input multi-task algorithm, spatial coordinate data from an optically tracked ultrasound probe is combined with an image clas-sifier using a recurrent neural network to generate two sets of predictions in real-time. The first set identifies relevant prostate anatomy visible in the field of view using the classes: outside prostate, prostate periphery, prostate centre. The second set recommends a probe angular adjustment to achieve alignment between the probe and prostate centre with the classes: move left, move right, stop. The algo-rithm was trained and tested on 9,743 clinical images from 61 treatment sessions across 32 patients. We evaluated classification accuracy against class labels de-rived from three experienced observers at 2/3 and 3/3 agreement thresholds. For images with unanimous consensus between observers, anatomical classification accuracy was 97.2% and probe adjustment accuracy was 94.9%. The algorithm identified optimal probe alignment within a mean (standard deviation) range of 3.7$^{\circ}$ (1.2$^{\circ}$) from angle labels with full observer consensus, comparable to the 2.8$^{\circ}$ (2.6$^{\circ}$) mean interobserver range. We propose such an algorithm could assist ra-diotherapy practitioners with limited experience of ultrasound image interpreta-tion by providing effective real-time feedback during patient set-up.