 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHREC 2022: pothole and crack detection in the road pavement using images and RGB-D data
May 27, 2022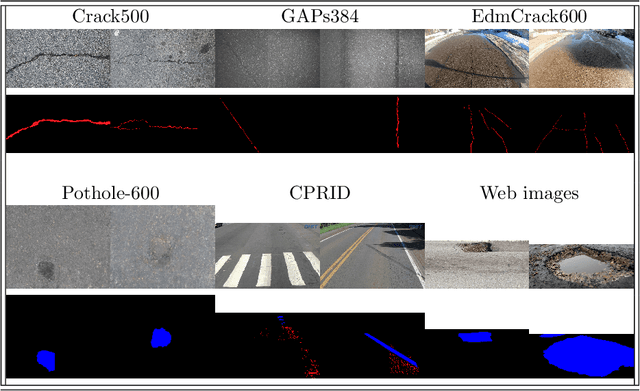
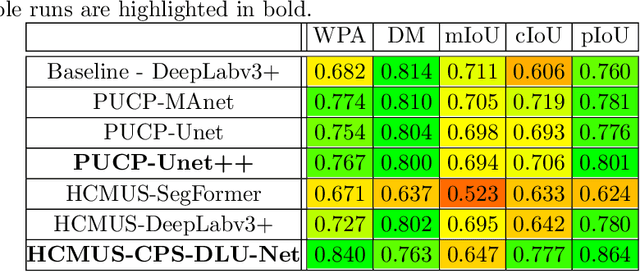
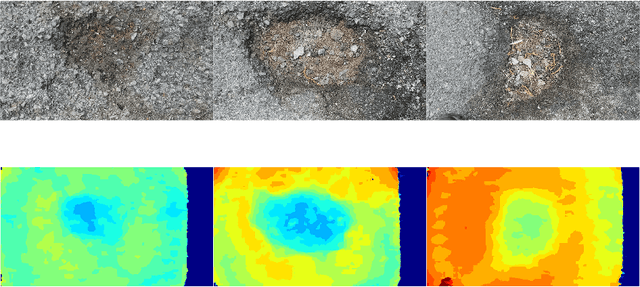
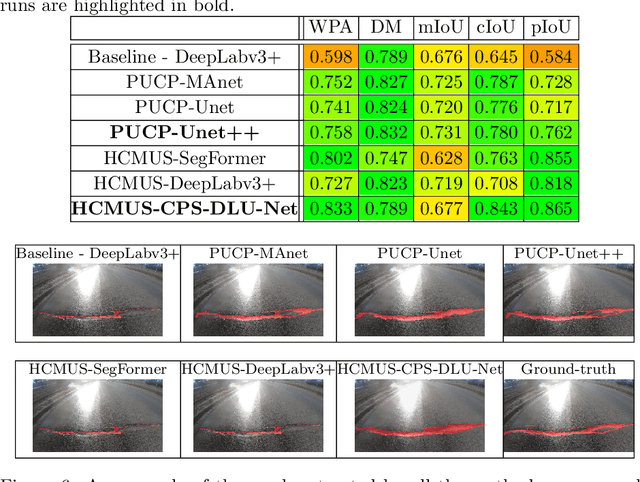
This paper describes the methods submitted for evaluation to the SHREC 2022 track on pothole and crack detection in the road pavement. A total of 7 different runs for the semantic segmentation of the road surface are compared, 6 from the participants plus a baseline method. All methods exploit Deep Learning techniques and their performance is tested using the same environment (i.e.: a single Jupyter notebook). A training set, composed of 3836 semantic segmentation image/mask pairs and 797 RGB-D video clips collected with the latest depth cameras was made available to the participants. The methods are then evaluated on the 496 image/mask pairs in the validation set, on the 504 pairs in the test set and finally on 8 video clips. The analysis of the results is based on quantitative metrics for image segmentation and qualitative analysis of the video clips. The participation and the results show that the scenario is of great interest and that the use of RGB-D data is still challenging in this context.
Edge-based LBP description of surfaces with colorimetric patterns
Apr 11, 2018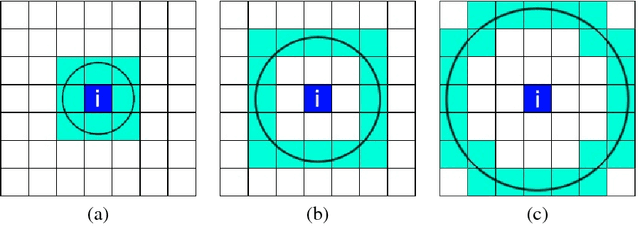


In this paper we target the problem of the retrieval of colour patterns over surfaces. We generalize to surface tessellations the well known Local Binary Pattern (LBP) descriptor for images. The key concept of the LBP is to code the variability of the colour values around each pixel. In the case of a surface tessellation we adopt rings around vertices that are obtained with a sphere-mesh intersection driven by the edges of the mesh; for this reason, we name our method edgeLBP. Experimental results are provided to show how this description performs well for pattern retrieval, also when patterns come from degraded and corrupted archaeological fragments.