 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentifying Large-Scale Linear Parameter Varying Systems with Dynamic Mode Decomposition Methods
Feb 04, 2025Linear Parameter Varying (LPV) Systems are a well-established class of nonlinear systems with a rich theory for stability analysis, control, and analytical response finding, among other aspects. Although there are works on data-driven identification of such systems, the literature is quite scarce in terms of works that tackle the identification of LPV models for large-scale systems. Since large-scale systems are ubiquitous in practice, this work develops a methodology for the local and global identification of large-scale LPV systems based on nonintrusive reduced-order modeling. The developed method is coined as DMD-LPV for being inspired in the Dynamic Mode Decomposition (DMD). To validate the proposed identification method, we identify a system described by a discretized linear diffusion equation, with the diffusion gain defined by a polynomial over a parameter. The experiments show that the proposed method can easily identify a reduced-order LPV model of a given large-scale system without the need to perform identification in the full-order dimension, and with almost no performance decay over performing a reduction, given that the model structure is well-established.
Multi-Step Embed to Control: A Novel Deep Learning-based Approach for Surrogate Modelling in Reservoir Simulation
Sep 16, 2024Reduced-order models, also known as proxy model or surrogate model, are approximate models that are less computational expensive as opposed to fully descriptive models. With the integration of machine learning, these models have garnered increasing research interests recently. However, many existing reduced-order modeling methods, such as embed to control (E2C) and embed to control and observe (E2CO), fall short in long-term predictions due to the accumulation of prediction errors over time. This issue arises partly from the one-step prediction framework inherent in E2C and E2CO architectures. This paper introduces a deep learning-based surrogate model, referred as multi-step embed-to-control model, for the construction of proxy models with improved long-term prediction performance. Unlike E2C and E2CO, the proposed network considers multiple forward transitions in the latent space at a time using Koopman operator, allowing the model to incorporate a sequence of state snapshots during training phrases. Additionally, the loss function of this novel approach has been redesigned to accommodate these multiple transitions and to respect the underlying physical principles. To validate the efficacy of the proposed method, the developed framework was implemented within two-phase (oil and water) reservoir model under a waterflooding scheme. Comparative analysis demonstrate that the proposed model significantly outperforms the conventional E2C model in long-term simulation scenarios. Notably, there was a substantial reduction in temporal errors in the prediction of saturation profiles and a decent improvement in pressure forecasting accuracy.
Neural Operator-Based Proxy for Reservoir Simulations Considering Varying Well Settings, Locations, and Permeability Fields
Jul 13, 2024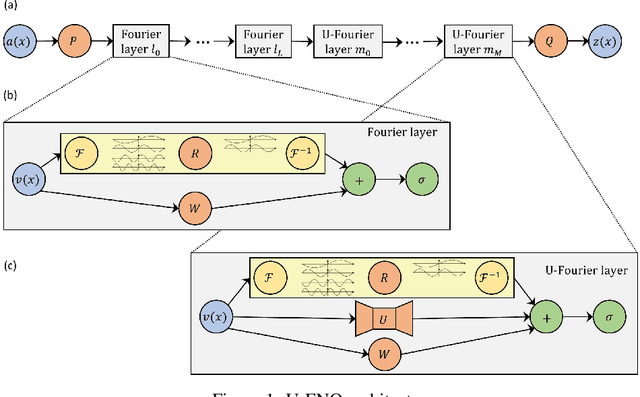
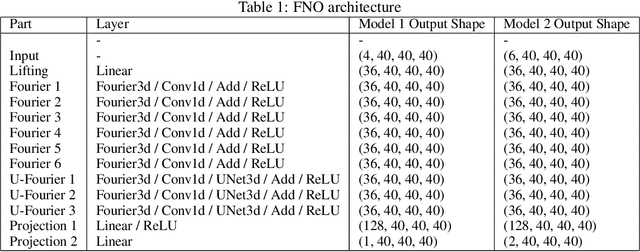
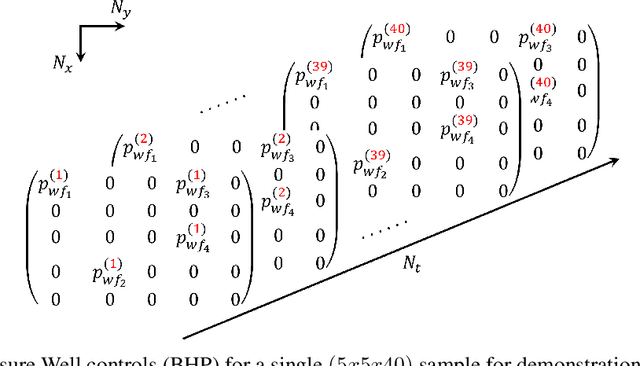
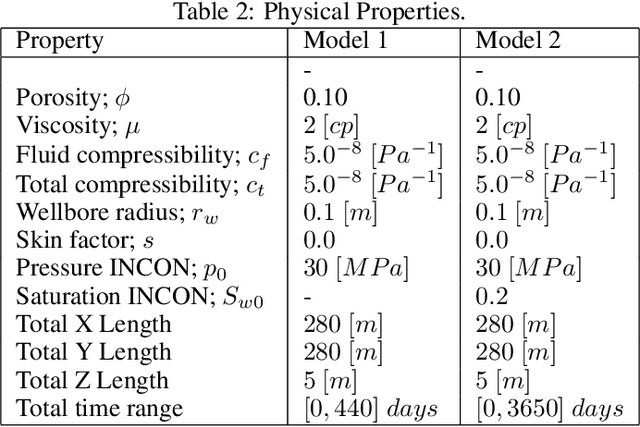
Simulating Darcy flows in porous media is fundamental to understand the future flow behavior of fluids in hydrocarbon and carbon storage reservoirs. Geological models of reservoirs are often associated with high uncertainly leading to many numerical simulations for history matching and production optimization. Machine learning models trained with simulation data can provide a faster alternative to traditional simulators. In this paper we present a single Fourier Neural Operator (FNO) surrogate that outperforms traditional reservoir simulators by the ability to predict pressures and saturations on varying permeability fields, well locations, well controls, and number of wells. The maximum-mean relative error of 95\% of pressure and saturation predictions is less than 5\%. This is achieved by employing a simple yet very effective data augmentation technique that reduces the dataset size by 75\% and reduces overfitting. Also, constructing the input tensor in a binary fashion enables predictions on unseen well locations, well controls, and number of wells. Such model can accelerate history matching and reservoir characterization procedures by several orders of magnitude. The ability to predict on new well locations, well controls, and number of wells enables highly efficient reservoir management and optimization.
Transfer learning-based physics-informed convolutional neural network for simulating flow in porous media with time-varying controls
Oct 10, 2023

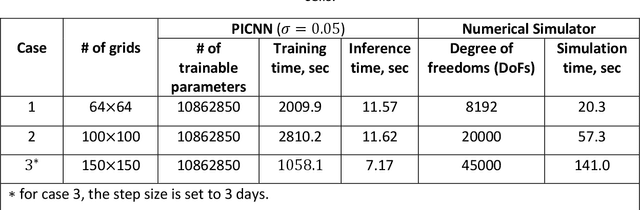
A physics-informed convolutional neural network is proposed to simulate two phase flow in porous media with time-varying well controls. While most of PICNNs in existing literatures worked on parameter-to-state mapping, our proposed network parameterizes the solution with time-varying controls to establish a control-to-state regression. Firstly, finite volume scheme is adopted to discretize flow equations and formulate loss function that respects mass conservation laws. Neumann boundary conditions are seamlessly incorporated into the semi-discretized equations so no additional loss term is needed. The network architecture comprises two parallel U-Net structures, with network inputs being well controls and outputs being the system states. To capture the time-dependent relationship between inputs and outputs, the network is well designed to mimic discretized state space equations. We train the network progressively for every timestep, enabling it to simultaneously predict oil pressure and water saturation at each timestep. After training the network for one timestep, we leverage transfer learning techniques to expedite the training process for subsequent timestep. The proposed model is used to simulate oil-water porous flow scenarios with varying reservoir gridblocks and aspects including computation efficiency and accuracy are compared against corresponding numerical approaches. The results underscore the potential of PICNN in effectively simulating systems with numerous grid blocks, as computation time does not scale with model dimensionality. We assess the temporal error using 10 different testing controls with variation in magnitude and another 10 with higher alternation frequency with proposed control-to-state architecture. Our observations suggest the need for a more robust and reliable model when dealing with controls that exhibit significant variations in magnitude or frequency.
Physics-informed Convolutional Recurrent Surrogate Model for Reservoir Simulation with Well Controls
May 15, 2023



This paper presents a novel surrogate model for modeling subsurface fluid flow with well controls using a physics-informed convolutional recurrent neural network (PICRNN). The model uses a convolutional long-short term memory (ConvLSTM) to capture the spatiotemporal dependencies of the state evolution dynamics in the porous flow. The ConvLSTM is linked to the state space equations, enabling the incorporation of a discrete-time sequence of well control. The model requires initial state condition and a sequence of well controls as inputs, and predicts the state variables of the system, such as pressure, as output. By minimizing the residuals of reservoir flow state-space equations, the network is trained without the need for labeled data. The model is designed to serve as a surrogate model for predicting future reservoir states based on the initial reservoir state and input engineering controls. Boundary conditions are enforced into the state-space equations so no additional loss term is needed. Three numerical cases are studied, demonstrating the model's effectiveness in predicting reservoir dynamics based on future well/system controls. The proposed model provides a new approach for efficient and accurate prediction of subsurface fluid flow, with potential applications in optimal control design for reservoir engineering.
Investigation of Proper Orthogonal Decomposition for Echo State Networks
Dec 02, 2022Echo State Networks (ESN) are a type of Recurrent Neural Networks that yields promising results in representing time series and nonlinear dynamic systems. Although they are equipped with a very efficient training procedure, Reservoir Computing strategies, such as the ESN, require the use of high order networks, i.e. large number of layers, resulting in number of states that is magnitudes higher than the number of model inputs and outputs. This not only makes the computation of a time step more costly, but also may pose robustness issues when applying ESNs to problems such as Model Predictive Control (MPC) and other optimal control problems. One such way to circumvent this is through Model Order Reduction strategies such as the Proper Orthogonal Decomposition (POD) and its variants (POD-DEIM), whereby we find an equivalent lower order representation to an already trained high dimension ESN. The objective of this work is to investigate and analyze the performance of POD methods in Echo State Networks, evaluating their effectiveness. To this end, we evaluate the Memory Capacity (MC) of the POD-reduced network in comparison to the original (full order) ENS. We also perform experiments on two different numerical case studies: a NARMA10 difference equation and an oil platform containing two wells and one riser. The results show that there is little loss of performance comparing the original ESN to a POD-reduced counterpart, and also that the performance of a POD-reduced ESN tend to be superior to a normal ESN of the same size. Also we attain speedups of around $80\%$ in comparison to the original ESN.
DREAMS: Drilling and Extraction Automated System
Jun 09, 2021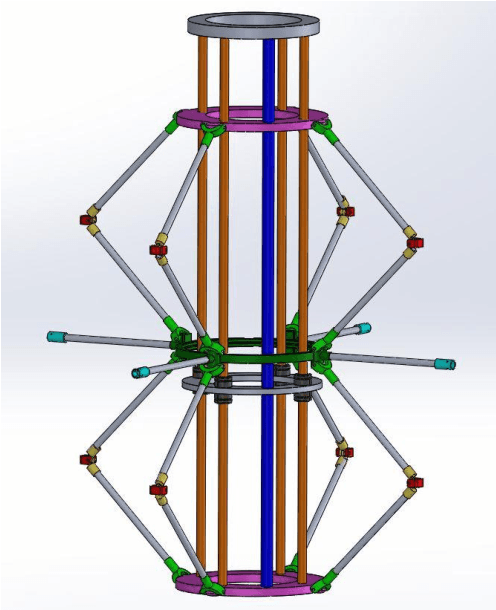
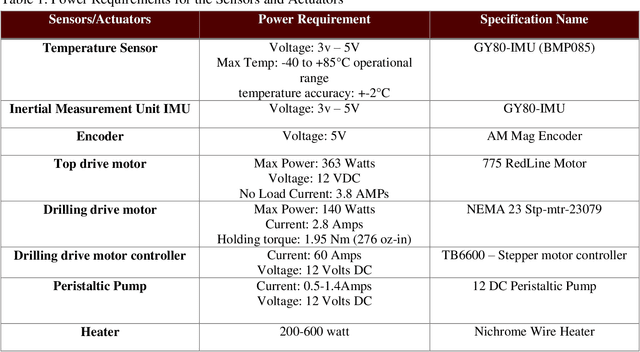
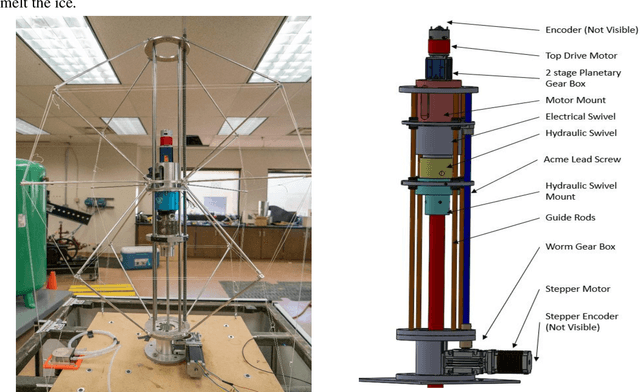
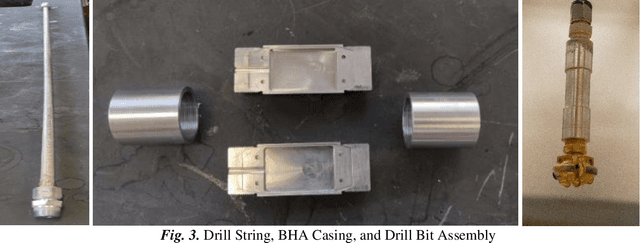
Drilling and Extraction Automated System (DREAMS) is a fully automated prototype-drilling rig that can drill, extract water and assess subsurface density profiles from simulated lunar and Martian subsurface ice. DREAMS system is developed by the Texas A&M drilling automation team and composed of four main components: 1- tensegrity rig structure, 2- drilling system, 3- water extracting and heating system, and 4- electronic hardware, controls, and machine algorithm. The vertical and rotational movements are controlled by using an Acme rod, stepper, and rotary motor. DREAMS is a unique system and different from other systems presented before in the NASA Rascal-Al competition because 1- It uses the tensegrity structure concept to decrease the system weight, improve mobility, and easier installation in space. 2- It cuts rock layers by using a short bit length connected to drill pipes. This drilling methodology is expected to drill hundreds and thousands of meters below the moon and Martian surfaces without any anticipated problems (not only 1 m.). 3- Drilling, heating, and extraction systems are integrated into one system that can work simultaneously or individually to save time and cost.