 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransfer learning-based physics-informed convolutional neural network for simulating flow in porous media with time-varying controls
Oct 10, 2023
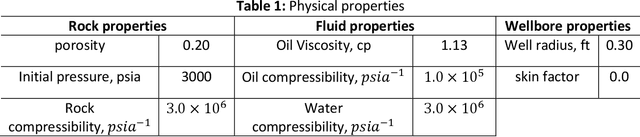

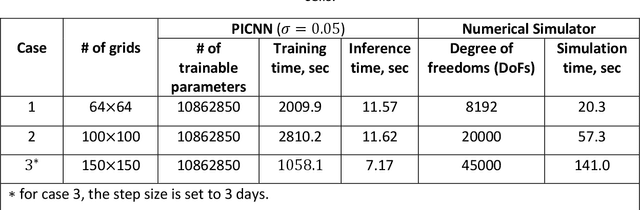
A physics-informed convolutional neural network is proposed to simulate two phase flow in porous media with time-varying well controls. While most of PICNNs in existing literatures worked on parameter-to-state mapping, our proposed network parameterizes the solution with time-varying controls to establish a control-to-state regression. Firstly, finite volume scheme is adopted to discretize flow equations and formulate loss function that respects mass conservation laws. Neumann boundary conditions are seamlessly incorporated into the semi-discretized equations so no additional loss term is needed. The network architecture comprises two parallel U-Net structures, with network inputs being well controls and outputs being the system states. To capture the time-dependent relationship between inputs and outputs, the network is well designed to mimic discretized state space equations. We train the network progressively for every timestep, enabling it to simultaneously predict oil pressure and water saturation at each timestep. After training the network for one timestep, we leverage transfer learning techniques to expedite the training process for subsequent timestep. The proposed model is used to simulate oil-water porous flow scenarios with varying reservoir gridblocks and aspects including computation efficiency and accuracy are compared against corresponding numerical approaches. The results underscore the potential of PICNN in effectively simulating systems with numerous grid blocks, as computation time does not scale with model dimensionality. We assess the temporal error using 10 different testing controls with variation in magnitude and another 10 with higher alternation frequency with proposed control-to-state architecture. Our observations suggest the need for a more robust and reliable model when dealing with controls that exhibit significant variations in magnitude or frequency.
Physics-informed Convolutional Recurrent Surrogate Model for Reservoir Simulation with Well Controls
May 15, 2023



This paper presents a novel surrogate model for modeling subsurface fluid flow with well controls using a physics-informed convolutional recurrent neural network (PICRNN). The model uses a convolutional long-short term memory (ConvLSTM) to capture the spatiotemporal dependencies of the state evolution dynamics in the porous flow. The ConvLSTM is linked to the state space equations, enabling the incorporation of a discrete-time sequence of well control. The model requires initial state condition and a sequence of well controls as inputs, and predicts the state variables of the system, such as pressure, as output. By minimizing the residuals of reservoir flow state-space equations, the network is trained without the need for labeled data. The model is designed to serve as a surrogate model for predicting future reservoir states based on the initial reservoir state and input engineering controls. Boundary conditions are enforced into the state-space equations so no additional loss term is needed. Three numerical cases are studied, demonstrating the model's effectiveness in predicting reservoir dynamics based on future well/system controls. The proposed model provides a new approach for efficient and accurate prediction of subsurface fluid flow, with potential applications in optimal control design for reservoir engineering.