 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResponsive Regulation of Dynamic UAV Communication Networks Based on Deep Reinforcement Learning
Aug 25, 2021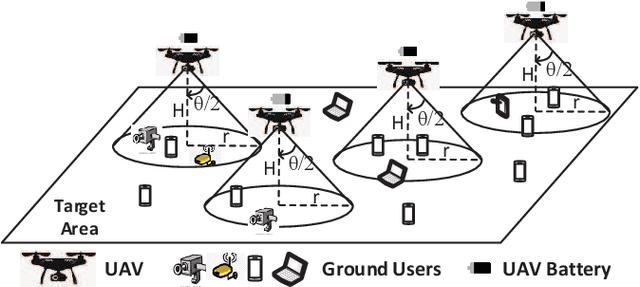
In this chapter, the regulation of Unmanned Aerial Vehicle (UAV) communication network is investigated in the presence of dynamic changes in the UAV lineup and user distribution. We target an optimal UAV control policy which is capable of identifying the upcoming change in the UAV lineup (quit or join-in) or user distribution, and proactively relocating the UAVs ahead of the change rather than passively dispatching the UAVs after the change. Specifically, a deep reinforcement learning (DRL)-based UAV control framework is developed to maximize the accumulated user satisfaction (US) score for a given time horizon which is able to handle the change in both the UAV lineup and user distribution. The framework accommodates the changed dimension of the state-action space before and after the UAV lineup change by deliberate state transition design. In addition, to handle the continuous state and action space, deep deterministic policy gradient (DDPG) algorithm, which is an actor-critic based DRL, is exploited. Furthermore, to promote the learning exploration around the timing of the change, the original DDPG is adapted into an asynchronous parallel computing (APC) structure which leads to a better training performance in both the critic and actor networks. Finally, extensive simulations are conducted to validate the convergence of the proposed learning approach, and demonstrate its capability in jointly handling the dynamics in UAV lineup and user distribution as well as its superiority over a passive reaction method.