 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyDA: Hypernetworks for Test Time Domain Adaptation in Medical Imaging Analysis
Mar 06, 2025



Medical imaging datasets often vary due to differences in acquisition protocols, patient demographics, and imaging devices. These variations in data distribution, known as domain shift, present a significant challenge in adapting imaging analysis models for practical healthcare applications. Most current domain adaptation (DA) approaches aim either to align the distributions between the source and target domains or to learn an invariant feature space that generalizes well across all domains. However, both strategies require access to a sufficient number of examples, though not necessarily annotated, from the test domain during training. This limitation hinders the widespread deployment of models in clinical settings, where target domain data may only be accessible in real time. In this work, we introduce HyDA, a novel hypernetwork framework that leverages domain characteristics rather than suppressing them, enabling dynamic adaptation at inference time. Specifically, HyDA learns implicit domain representations and uses them to adjust model parameters on-the-fly, effectively interpolating to unseen domains. We validate HyDA on two clinically relevant applications - MRI brain age prediction and chest X-ray pathology classification - demonstrating its ability to generalize across tasks and modalities. Our code is available at TBD.
Physics and semantic informed multi-sensor calibration via optimization theory and self-supervised learning
Jun 06, 2022
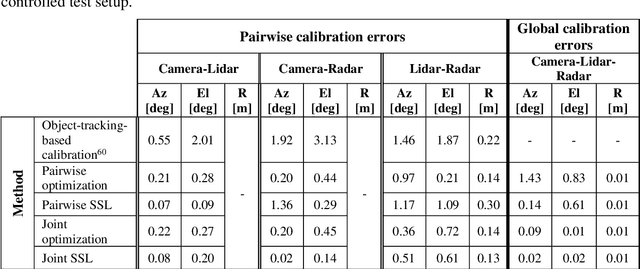


Achieving safe and reliable autonomous driving relies greatly on the ability to achieve an accurate and robust perception system; however, this cannot be fully realized without precisely calibrated sensors. Environmental and operational conditions as well as improper maintenance can produce calibration errors inhibiting sensor fusion and, consequently, degrading the perception performance. Traditionally, sensor calibration is performed in a controlled environment with one or more known targets. Such a procedure can only be carried out in between drives and requires manual operation; a tedious task if needed to be conducted on a regular basis. This sparked a recent interest in online targetless methods, capable of yielding a set of geometric transformations based on perceived environmental features, however, the required redundancy in sensing modalities makes this task even more challenging, as the features captured by each modality and their distinctiveness may vary. We present a holistic approach to performing joint calibration of a camera-lidar-radar trio. Leveraging prior knowledge and physical properties of these sensing modalities together with semantic information, we propose two targetless calibration methods within a cost minimization framework once via direct online optimization, and second via self-supervised learning (SSL).