 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics and semantic informed multi-sensor calibration via optimization theory and self-supervised learning
Jun 06, 2022
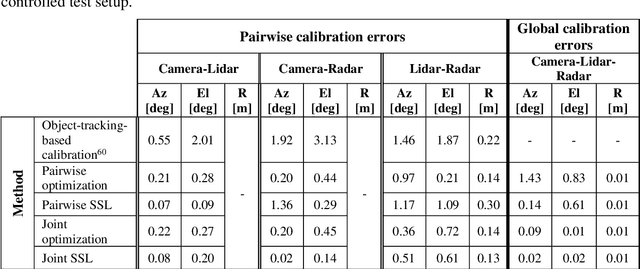


Achieving safe and reliable autonomous driving relies greatly on the ability to achieve an accurate and robust perception system; however, this cannot be fully realized without precisely calibrated sensors. Environmental and operational conditions as well as improper maintenance can produce calibration errors inhibiting sensor fusion and, consequently, degrading the perception performance. Traditionally, sensor calibration is performed in a controlled environment with one or more known targets. Such a procedure can only be carried out in between drives and requires manual operation; a tedious task if needed to be conducted on a regular basis. This sparked a recent interest in online targetless methods, capable of yielding a set of geometric transformations based on perceived environmental features, however, the required redundancy in sensing modalities makes this task even more challenging, as the features captured by each modality and their distinctiveness may vary. We present a holistic approach to performing joint calibration of a camera-lidar-radar trio. Leveraging prior knowledge and physical properties of these sensing modalities together with semantic information, we propose two targetless calibration methods within a cost minimization framework once via direct online optimization, and second via self-supervised learning (SSL).
Deep DNA Storage: Scalable and Robust DNA Storage via Coding Theory and Deep Learning
Aug 31, 2021



The concept of DNA storage was first suggested in 1959 by Richard Feynman who shared his vision regarding nanotechnology in the talk "There is plenty of room at the bottom". Later, towards the end of the 20-th century, the interest in storage solutions based on DNA molecules was increased as a result of the human genome project which in turn led to a significant progress in sequencing and assembly methods. DNA storage enjoys major advantages over the well-established magnetic and optical storage solutions. As opposed to magnetic solutions, DNA storage does not require electrical supply to maintain data integrity and is superior to other storage solutions in both density and durability. Given the trends in cost decreases of DNA synthesis and sequencing, it is now acknowledged that within the next 10-15 years DNA storage may become a highly competitive archiving technology and probably later the main such technology. With that said, the current implementations of DNA based storage systems are very limited and are not fully optimized to address the unique pattern of errors which characterize the synthesis and sequencing processes. In this work, we propose a robust, efficient and scalable solution to implement DNA-based storage systems. Our method deploys Deep Neural Networks (DNN) which reconstruct a sequence of letters based on imperfect cluster of copies generated by the synthesis and sequencing processes. A tailor-made Error-Correcting Code (ECC) is utilized to combat patterns of errors which occur during this process. Since our reconstruction method is adapted to imperfect clusters, our method overcomes the time bottleneck of the noisy DNA copies clustering process by allowing the use of a rapid and scalable pseudo-clustering instead. Our architecture combines between convolutions and transformers blocks and is trained using synthetic data modelled after real data statistics.
Coherent, super resolved radar beamforming using self-supervised learning
Jun 21, 2021
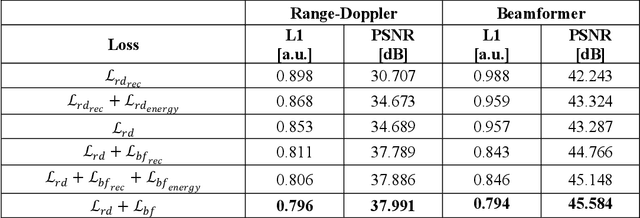

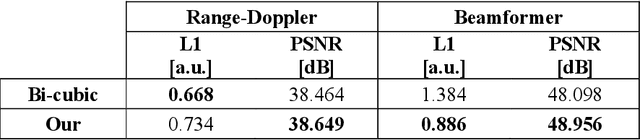
High resolution automotive radar sensors are required in order to meet the high bar of autonomous vehicles needs and regulations. However, current radar systems are limited in their angular resolution causing a technological gap. An industry and academic trend to improve angular resolution by increasing the number of physical channels, also increases system complexity, requires sensitive calibration processes, lowers robustness to hardware malfunctions and drives higher costs. We offer an alternative approach, named Radar signal Reconstruction using Self Supervision (R2-S2), which significantly improves the angular resolution of a given radar array without increasing the number of physical channels. R2-S2 is a family of algorithms which use a Deep Neural Network (DNN) with complex range-Doppler radar data as input and trained in a self-supervised method using a loss function which operates in multiple data representation spaces. Improvement of 4x in angular resolution was demonstrated using a real-world dataset collected in urban and highway environments during clear and rainy weather conditions.