 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Modal Simultaneous Forecasting of Vehicle Position Sequences using Social Attention
Oct 08, 2019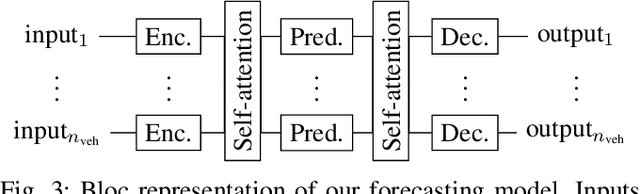
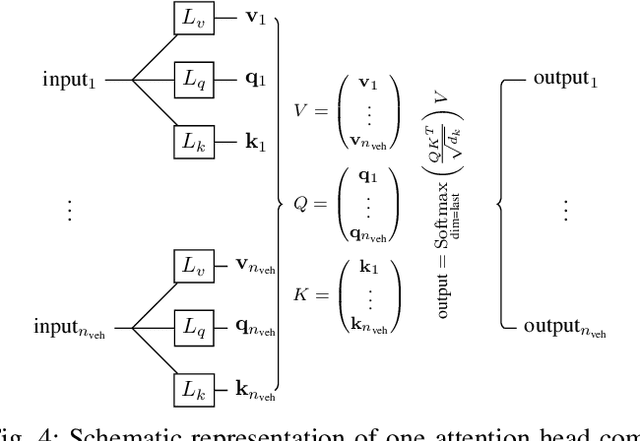


Vehicle trajectory forecasting models use a wide variety of frameworks for interaction and multi-modality. They rely on various representations of the road scene and definitions of maneuvers. In this paper we present a simple model that simultaneously forecasts each vehicle position on a road scene as a sequence of multi-modal probability density functions. This relies solely on vehicle position tracks and does not define maneuvers. We produce an easily extendable model that combines these predictive capabilities while surpassing state-of-the-art results. Its architecture uses multi-head attention to account for complete interactions between all vehicles, and long short-term memory (LSTM) layers for encoding and forecasting.
Inertial Single Vehicle Trajectory Prediction Baselines and Applications with the NGSIM Dataset
Aug 29, 2019
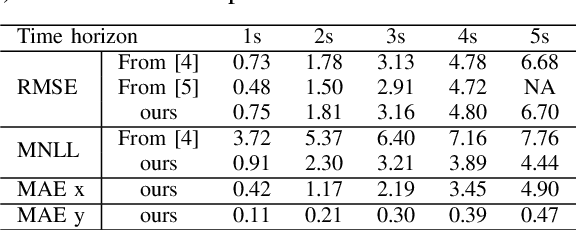

In the recent vehicle trajectory prediction literature, the most common baselines are briefly introduced without the necessary information to reproduce it. In this article we produce reproducible vehicle prediction results from simple models. For that purpose, the process is explicit, and the code is available. Those baseline models are a constant velocity model and a single vehicle prediction model. They are applied on the NGSIM US-101 and I-80 datasets using only relative positions. Thus, the process can be reproduced with any database containing tracking of vehicle positions. Produced results on this database establish the three most used trajectory prediction performance indicators: Root Mean Squared Error (RMSE), Negative Log-Likelihood (NLL), and Mean Absolute Error (MAE). The NLL estimation needs attention because several formulations that differ from the mathematical definition are used in other works. This article is meant to be used along with the published code to establish baselines for further work.