 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNaïveRole: Author-Contribution Extraction and Parsing from Biomedical Manuscripts
Dec 15, 2019
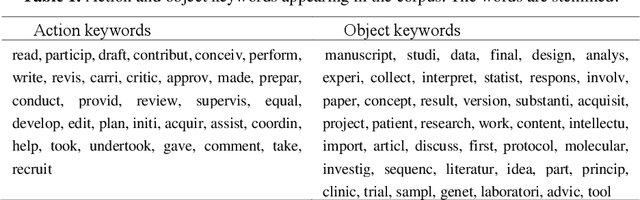
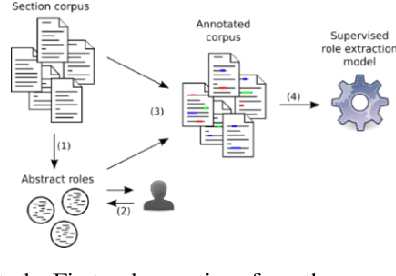
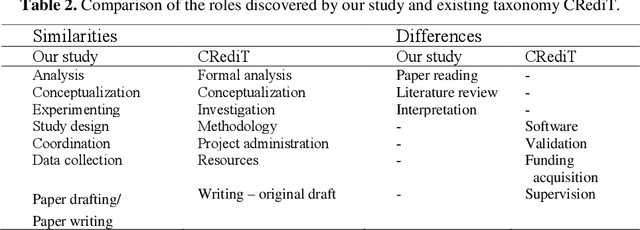
Information about the contributions of individual authors to scientific publications is important for assessing authors' achievements. Some biomedical publications have a short section that describes authors' roles and contributions. It is usually written in natural language and hence author contributions cannot be trivially extracted in a machine-readable format. In this paper, we present 1) A statistical analysis of roles in author contributions sections, and 2) Na\"iveRole, a novel approach to extract structured authors' roles from author contribution sections. For the first part, we used co-clustering techniques, as well as Open Information Extraction, to semi-automatically discover the popular roles within a corpus of 2,000 contributions sections from PubMed Central. The discovered roles were used to automatically build a training set for Na\"iveRole, our role extractor approach, based on Na\"ive Bayes. Na\"iveRole extracts roles with a micro-averaged precision of 0.68, recall of 0.48 and F1 of 0.57. It is, to the best of our knowledge, the first attempt to automatically extract author roles from research papers. This paper is an extended version of a previous poster published at JCDL 2018.
* arXiv admin note: substantial text overlap with arXiv:1802.01174
ParsRec: A Novel Meta-Learning Approach to Recommending Bibliographic Reference Parsers
Nov 26, 2018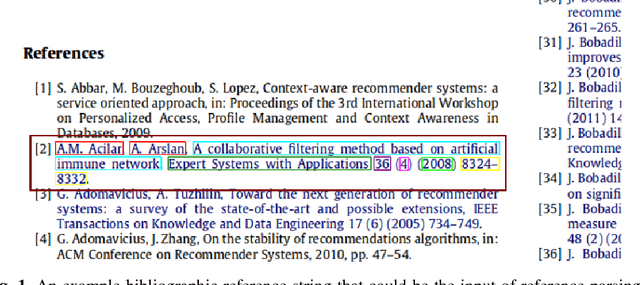
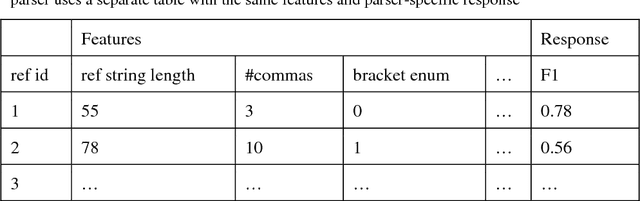
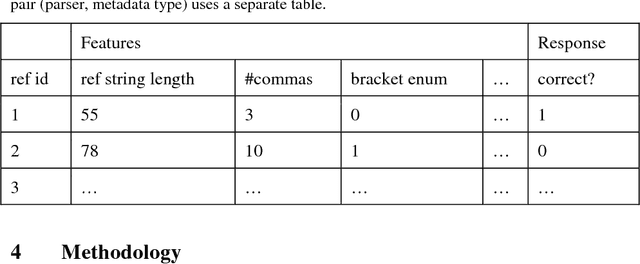
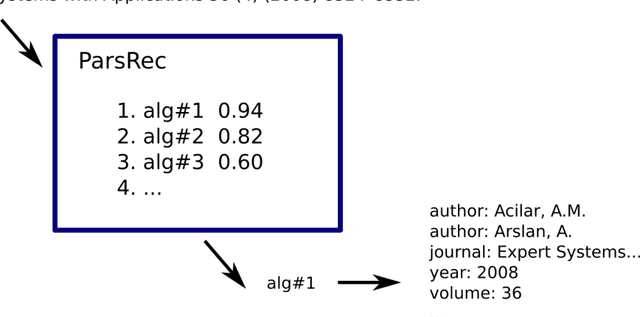
Bibliographic reference parsers extract machine-readable metadata such as author names, title, journal, and year from bibliographic reference strings. To extract the metadata, the parsers apply heuristics or machine learning. However, no reference parser, and no algorithm, consistently gives the best results in every scenario. For instance, one tool may be best in extracting titles in ACM citation style, but only third best when APA is used. Another tool may be best in extracting English author names, while another one is best for noisy data (i.e. inconsistent citation styles). In this paper, which is an extended version of our recent RecSys poster, we address the problem of reference parsing from a recommender-systems and meta-learning perspective. We propose ParsRec, a meta-learning based recommender-system that recommends the potentially most effective parser for a given reference string. ParsRec recommends one out of 10 open-source parsers: Anystyle-Parser, Biblio, CERMINE, Citation, Citation-Parser, GROBID, ParsCit, PDFSSA4MET, Reference Tagger, and Science Parse. We evaluate ParsRec on 105k references from chemistry. We propose two approaches to meta-learning recommendations. The first approach learns the best parser for an entire reference string. The second approach learns the best parser for each metadata type in a reference string. The second approach achieved a 2.6% increase in F1 (0.909 vs. 0.886) over the best single parser (GROBID), reducing the false positive rate by 20.2% (0.075 vs. 0.094), and the false negative rate by 18.9% (0.107 vs. 0.132).
Hybrid Approach to Automation, RPA and Machine Learning: a Method for the Human-centered Design of Software Robots
Nov 06, 2018One of the more prominent trends within Industry 4.0 is the drive to employ Robotic Process Automation (RPA), especially as one of the elements of the Lean approach. The full implementation of RPA is riddled with challenges relating both to the reality of everyday business operations, from SMEs to SSCs and beyond, and the social effects of the changing job market. To successfully address these points there is a need to develop a solution that would adjust to the existing business operations and at the same time lower the negative social impact of the automation process. To achieve these goals we propose a hybrid, human-centered approach to the development of software robots. This design and implementation method combines the Living Lab approach with empowerment through participatory design to kick-start the co-development and co-maintenance of hybrid software robots which, supported by variety of AI methods and tools, including interactive and collaborative ML in the cloud, transform menial job posts into higher-skilled positions, allowing former employees to stay on as robot co-designers and maintainers, i.e. as co-programmers who supervise the machine learning processes with the use of tailored high-level RPA Domain Specific Languages (DSLs) to adjust the functioning of the robots and maintain operational flexibility.