 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning and Analyzing the PID and Fuzzy Control System for an Inverted Pendulum
Nov 09, 2021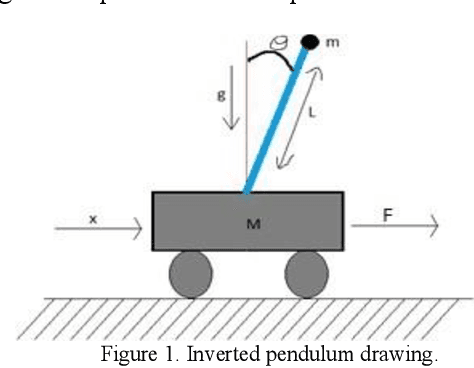
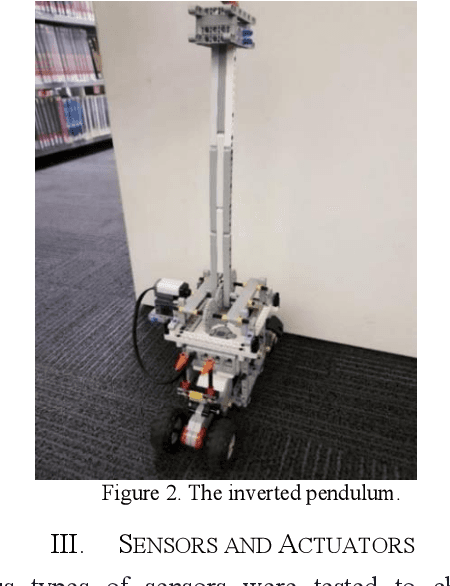
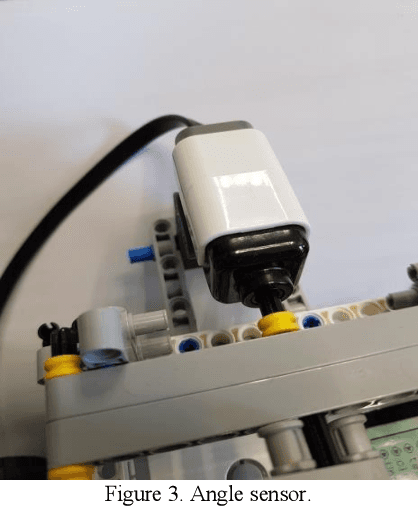
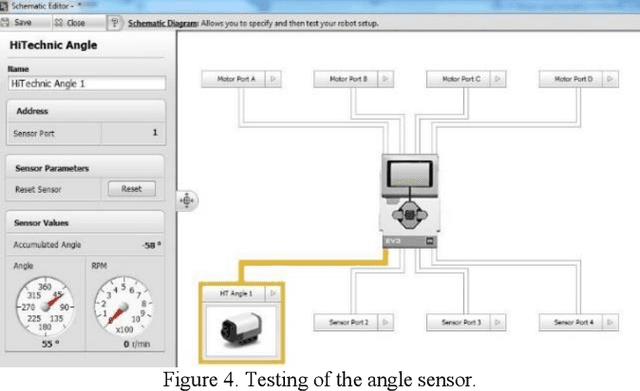
The inverted pendulum is a non-linear unbalanced system that needs to be controlled using motors to achieve stability and equilibrium. The inverted pendulum is constructed with Lego and using the Lego Mindstorm NXT, which is a programmable robot capable of completing many different functions. In this paper, an initial design of the inverted pendulum is proposed and the performance of different sensors, which are compatible with the Lego Mindstorm NXT was studied. Furthermore, the ability of computer vision to achieve the stability required to maintain the system is also investigated. The inverted pendulum is a conventional cart that can be controlled using a Fuzzy Logic controller that produces a self-tuning PID control for the cart to move on. The fuzzy logic and PID are simulated in MATLAB and Simulink, and the program for the robot is developed in the LabVIEW software.
Using The Feedback of Dynamic Active-Pixel Vision Sensor to Prevent Slip in Real Time
Nov 09, 2021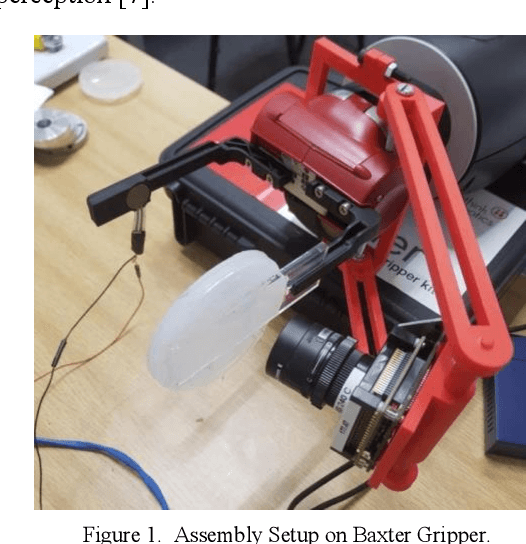
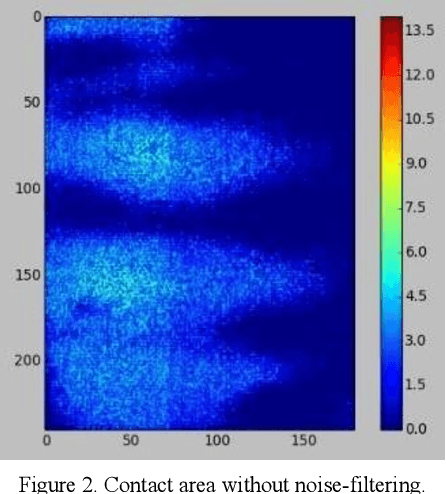
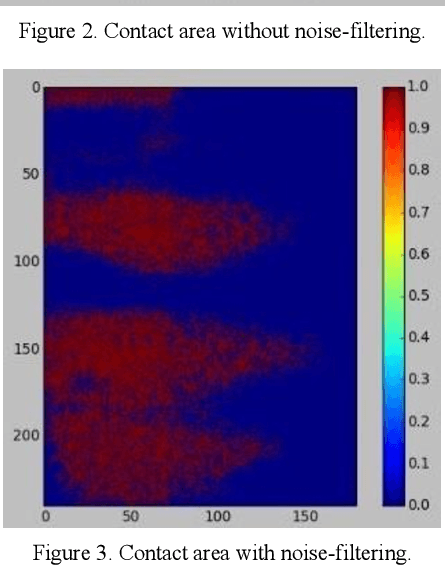
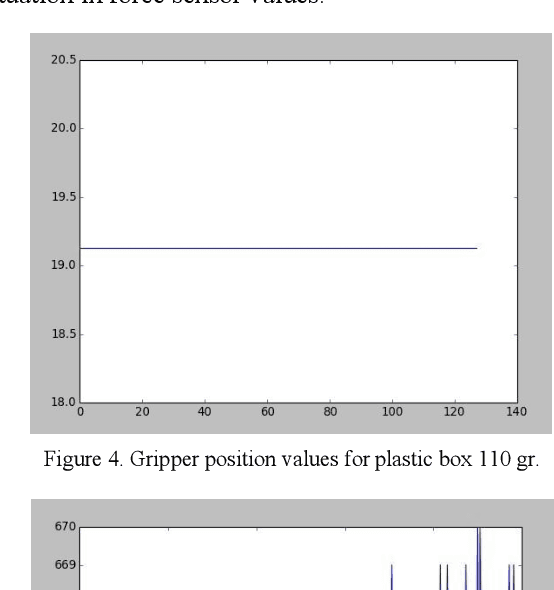
The objective of this paper is to describe an approach to detect the slip and contact force in real-time feedback. In this novel approach, the DAVIS camera is used as a vision tactile sensor due to its fast process speed and high resolution. Two hundred experiments were performed on four objects with different shapes, sizes, weights, and materials to compare the accuracy and response of the Baxter robot grippers to avoid slipping. The advanced approach is validated by using a force-sensitive resistor (FSR402). The events captured with the DAVIS camera are processed with specific algorithms to provide feedback to the Baxter robot aiding it to detect the slip.
A Deep Convolutional Neural Network for Lung Cancer Diagnostic
Apr 22, 2018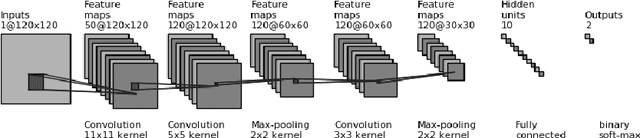
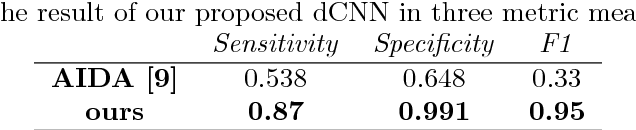
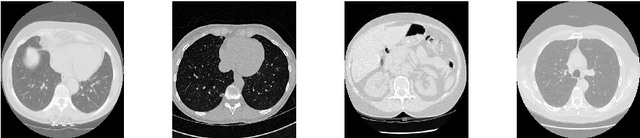
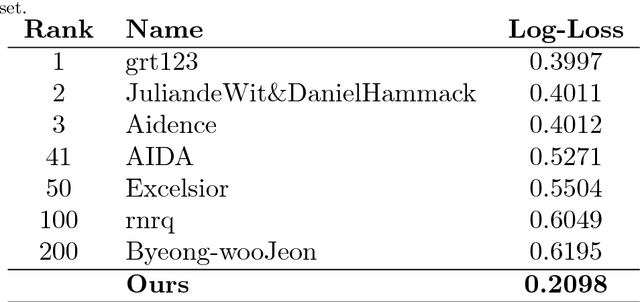
In this paper, we examine the strength of deep learning technique for diagnosing lung cancer on medical image analysis problem. Convolutional neural networks (CNNs) models become popular among the pattern recognition and computer vision research area because of their promising outcome on generating high-level image representations. We propose a new deep learning architecture for learning high-level image representation to achieve high classification accuracy with low variance in medical image binary classification tasks. We aim to learn discriminant compact features at beginning of our deep convolutional neural network. We evaluate our model on Kaggle Data Science Bowl 2017 (KDSB17) data set, and compare it with some related works proposed in the Kaggle competition.