 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning and Analyzing the PID and Fuzzy Control System for an Inverted Pendulum
Paper and Code
Nov 09, 2021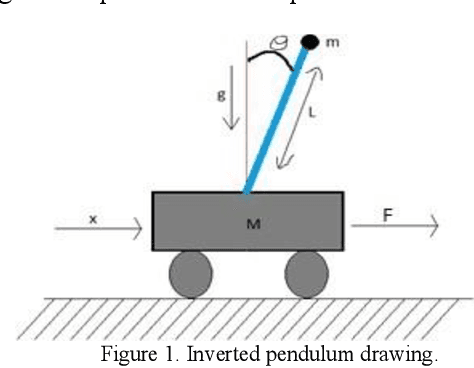
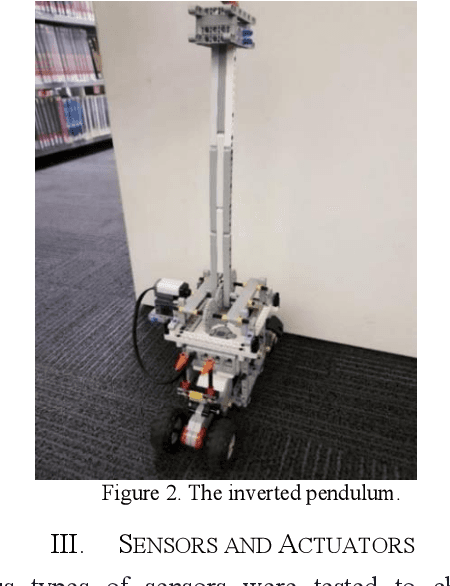
The inverted pendulum is a non-linear unbalanced system that needs to be controlled using motors to achieve stability and equilibrium. The inverted pendulum is constructed with Lego and using the Lego Mindstorm NXT, which is a programmable robot capable of completing many different functions. In this paper, an initial design of the inverted pendulum is proposed and the performance of different sensors, which are compatible with the Lego Mindstorm NXT was studied. Furthermore, the ability of computer vision to achieve the stability required to maintain the system is also investigated. The inverted pendulum is a conventional cart that can be controlled using a Fuzzy Logic controller that produces a self-tuning PID control for the cart to move on. The fuzzy logic and PID are simulated in MATLAB and Simulink, and the program for the robot is developed in the LabVIEW software.