Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing The Feedback of Dynamic Active-Pixel Vision Sensor to Prevent Slip in Real Time
Paper and Code
Nov 09, 2021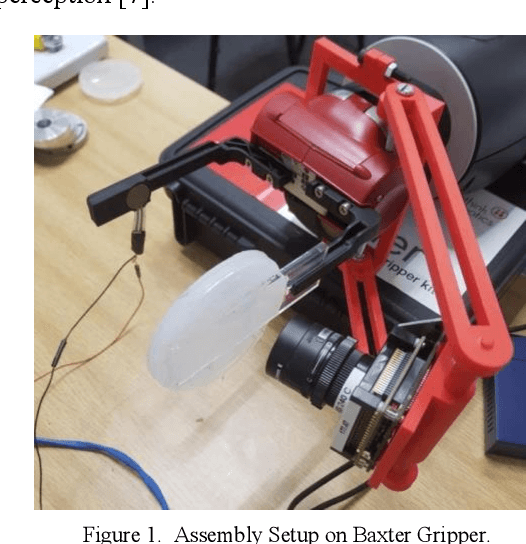
The objective of this paper is to describe an approach to detect the slip and contact force in real-time feedback. In this novel approach, the DAVIS camera is used as a vision tactile sensor due to its fast process speed and high resolution. Two hundred experiments were performed on four objects with different shapes, sizes, weights, and materials to compare the accuracy and response of the Baxter robot grippers to avoid slipping. The advanced approach is validated by using a force-sensitive resistor (FSR402). The events captured with the DAVIS camera are processed with specific algorithms to provide feedback to the Baxter robot aiding it to detect the slip.
* 5 pages, Accepted for The 6th International Conference on
Mechatronics and Robotics Engineering (ICMRE 2020)
View paper on