 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEigen-Factors an Alternating Optimization for Back-end Plane SLAM of 3D Point Clouds
Apr 03, 2023Modern depth sensors can generate a huge number of 3D points in few seconds to be latter processed by Localization and Mapping algorithms. Ideally, these algorithms should handle efficiently large sizes of Point Clouds under the assumption that using more points implies more information available. The Eigen Factors (EF) is a new algorithm that solves SLAM by using planes as the main geometric primitive. To do so, EF exhaustively calculates the error of all points at complexity $O(1)$, thanks to the {\em Summation matrix} $S$ of homogeneous points. The solution of EF is highly efficient: i) the state variables are only the sensor poses -- trajectory, while the plane parameters are estimated previously in closed from and ii) EF alternating optimization uses a Newton-Raphson method by a direct analytical calculation of the gradient and the Hessian, which turns out to be a block diagonal matrix. Since we require to differentiate over eigenvalues and matrix elements, we have developed an intuitive methodology to calculate partial derivatives in the manifold of rigid body transformations $SE(3)$, which could be applied to unrelated problems that require analytical derivatives of certain complexity. We evaluate EF and other state-of-the-art plane SLAM back-end algorithms in a synthetic environment. The evaluation is extended to ICL dataset (RGBD) and LiDAR KITTI dataset. Code is publicly available at https://github.com/prime-slam/EF-plane-SLAM.
EVOPS Benchmark: Evaluation of Plane Segmentation from RGBD and LiDAR Data
Apr 12, 2022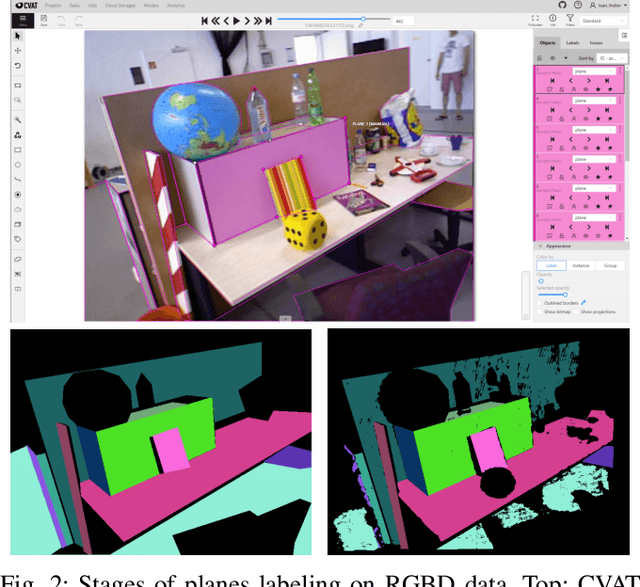
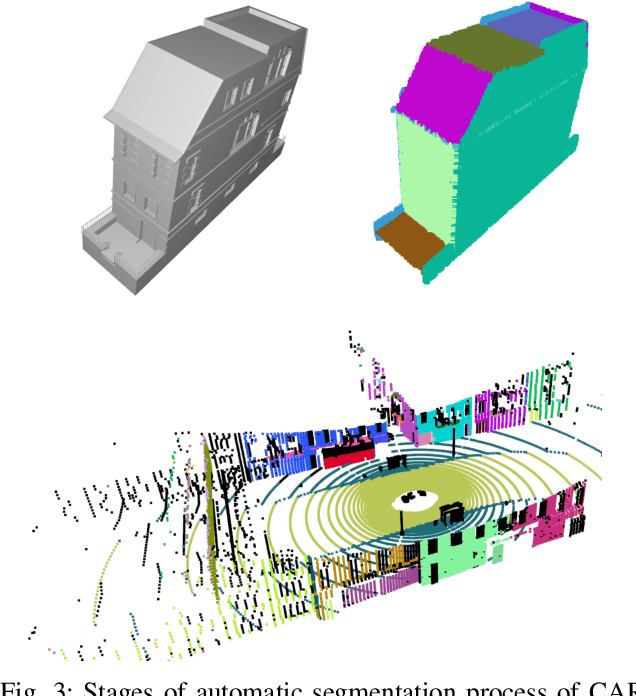
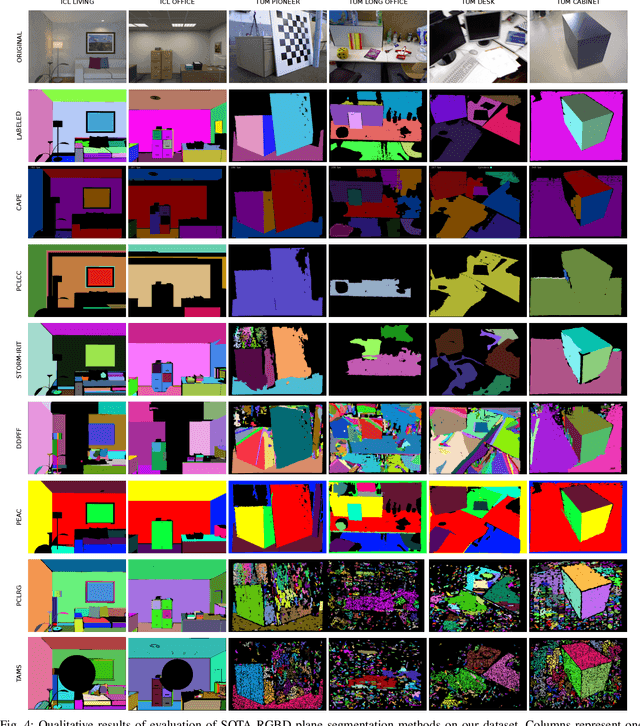
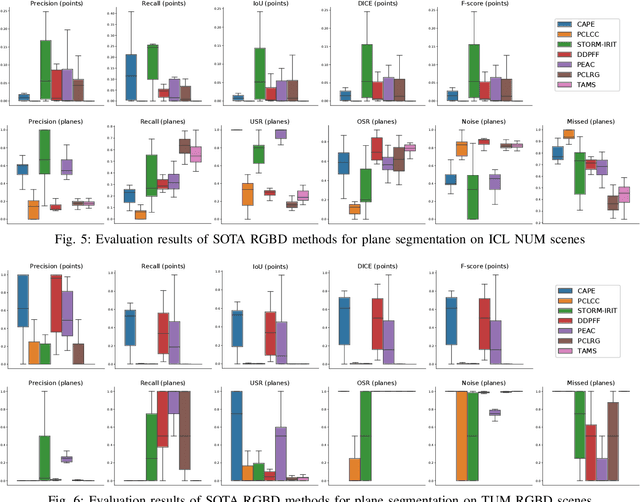
This paper provides the EVOPS dataset for plane segmentation from 3D data, both from RGBD images and LiDAR point clouds (PC). We have designed two annotation methodologies (RGBD and LiDAR) running on well-known and widely-used datasets and we have provided a complete set of benchmarking tools including point, planes and segmentation metrics. The data includes a total number of 10k RGBD and 7K LiDAR frames over different selected scenes which consist of high quality segmented planes. The experiments report quality of SOTA methods for RGBD plane segmentation on our annotated data. All labeled data and benchmark tools used have been made publicly available.