Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEVOPS Benchmark: Evaluation of Plane Segmentation from RGBD and LiDAR Data
Paper and Code
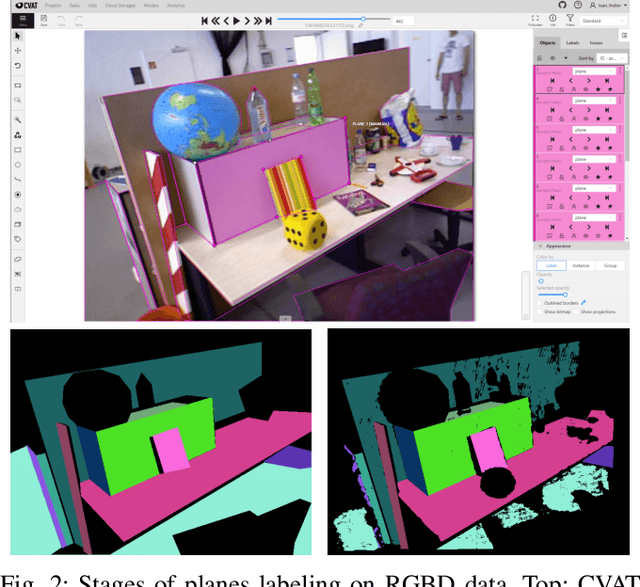
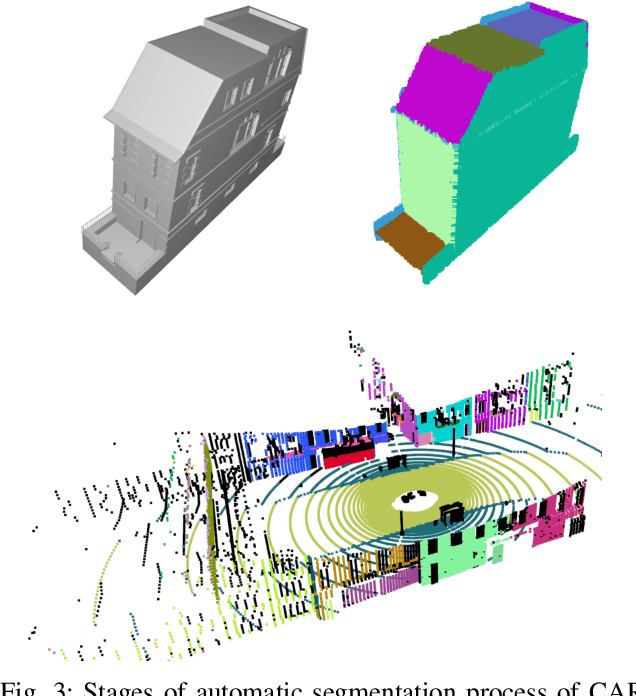
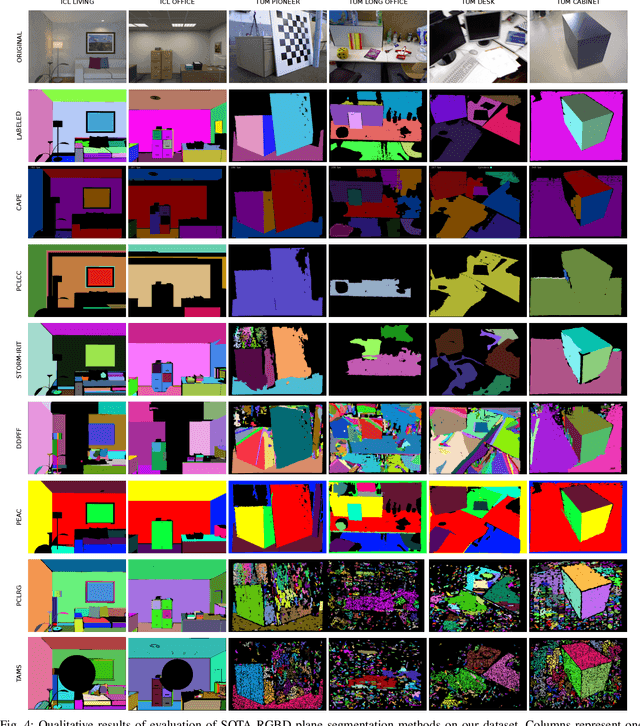
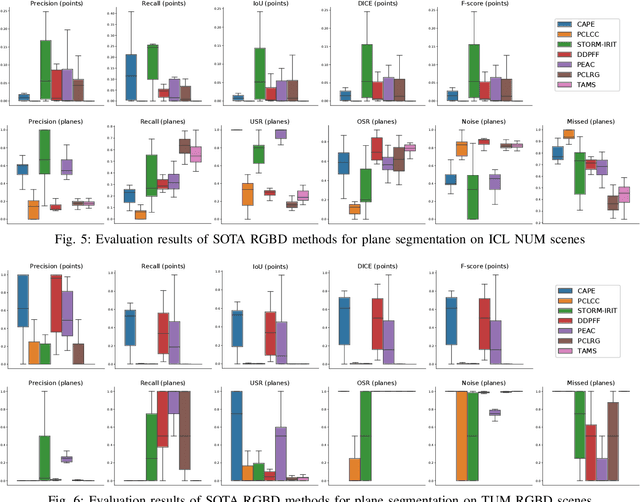
This paper provides the EVOPS dataset for plane segmentation from 3D data, both from RGBD images and LiDAR point clouds (PC). We have designed two annotation methodologies (RGBD and LiDAR) running on well-known and widely-used datasets and we have provided a complete set of benchmarking tools including point, planes and segmentation metrics. The data includes a total number of 10k RGBD and 7K LiDAR frames over different selected scenes which consist of high quality segmented planes. The experiments report quality of SOTA methods for RGBD plane segmentation on our annotated data. All labeled data and benchmark tools used have been made publicly available.
View paper on