 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Study on Monthly Marine Heatwave Forecasts in New Zealand: An Investigation of Imbalanced Regression Loss Functions with Neural Network Models
Feb 19, 2025Marine heatwaves (MHWs) are extreme ocean-temperature events with significant impacts on marine ecosystems and related industries. Accurate forecasts (one to six months ahead) of MHWs would aid in mitigating these impacts. However, forecasting MHWs presents a challenging imbalanced regression task due to the rarity of extreme temperature anomalies in comparison to more frequent moderate conditions. In this study, we examine monthly MHW forecasts for 12 locations around New Zealand. We use a fully-connected neural network and compare standard and specialized regression loss functions, including the mean squared error (MSE), the mean absolute error (MAE), the Huber, the weighted MSE, the focal-R, the balanced MSE, and a proposed scaling-weighted MSE. Results show that (i) short lead times (one month) are considerably more predictable than three- and six-month leads, (ii) models trained with the standard MSE or MAE losses excel at forecasting average conditions but struggle to capture extremes, and (iii) specialized loss functions such as the balanced MSE and our scaling-weighted MSE substantially improve forecasting of MHW and suspected MHW events. These findings underscore the importance of tailored loss functions for imbalanced regression, particularly in forecasting rare but impactful events such as MHWs.
Diving Deep: Forecasting Sea Surface Temperatures and Anomalies
Jan 10, 2025This overview paper details the findings from the Diving Deep: Forecasting Sea Surface Temperatures and Anomalies Challenge at the European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases (ECML PKDD) 2024. The challenge focused on the data-driven predictability of global sea surface temperatures (SSTs), a key factor in climate forecasting, ecosystem management, fisheries management, and climate change monitoring. The challenge involved forecasting SST anomalies (SSTAs) three months in advance using historical data and included a special task of predicting SSTAs nine months ahead for the Baltic Sea. Participants utilized various machine learning approaches to tackle the task, leveraging data from ERA5. This paper discusses the methodologies employed, the results obtained, and the lessons learned, offering insights into the future of climate-related predictive modeling.
Vision-based Navigation for a Small-scale Quadruped Robot Pegasus-Mini
Oct 09, 2021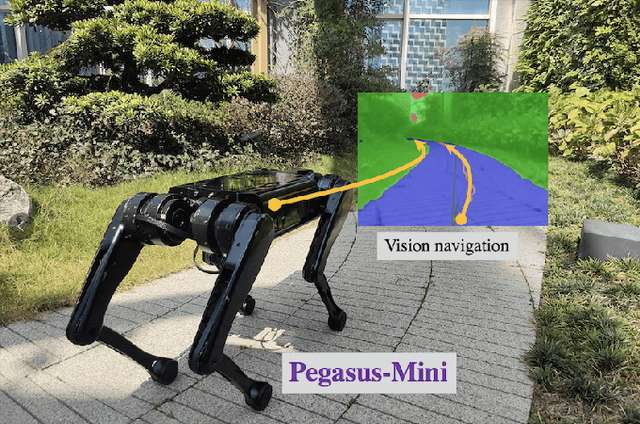
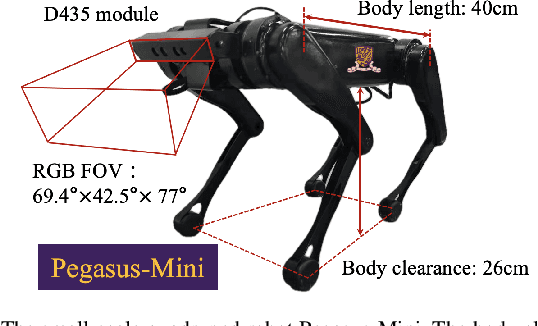
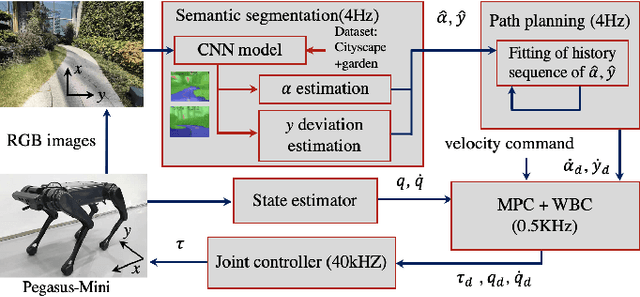
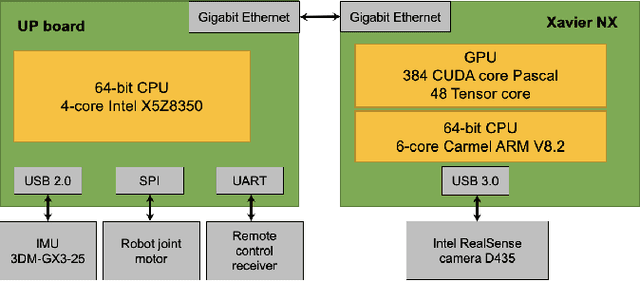
Quadruped locomotion is currently a vibrant research area, which has reached a level of maturity and performance that enables some of the most advanced real-world applications with autonomous quadruped robots both in academia and industry. Blind robust quadruped locomotion has been pushed forward in control and technology aspects within recent decades. However, in the complicated environment, the capability including terrain perception and path planning is still required. Visual perception is an indispensable ability in legged locomotion for such a demand. This study explores a vision-based navigation method for a small-scale quadruped robot Pegasus-Mini, aiming to propose a method that enables efficient and reliable navigation for the small-scale quadruped locomotion. The vision-based navigation method proposed in this study is applicable in such a small-scale quadruped robot platform in which the computation resources and space are limited. The semantic segmentation based on a CNN model is adopted for the real-time path segmentation in the outdoor environment. The desired traverse trajectory is generated through real-time updating the middle line, which is calculated from the edge position of the segmented path in the images. To enhance the stability of the path planning directly based on the semantic segmentation method, a trajectory compensation method is supplemented considering the temporal information to revise the untrustworthy planned path. Experiments of semantic segmentation and navigation in a garden scene are demonstrated to verify the effectiveness of the proposed method.