 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Pipeline for Automated Visual Moth Monitoring: Insect Localization and Species Classification
Jul 28, 2023



Biodiversity monitoring is crucial for tracking and counteracting adverse trends in population fluctuations. However, automatic recognition systems are rarely applied so far, and experts evaluate the generated data masses manually. Especially the support of deep learning methods for visual monitoring is not yet established in biodiversity research, compared to other areas like advertising or entertainment. In this paper, we present a deep learning pipeline for analyzing images captured by a moth scanner, an automated visual monitoring system of moth species developed within the AMMOD project. We first localize individuals with a moth detector and afterward determine the species of detected insects with a classifier. Our detector achieves up to 99.01% mean average precision and our classifier distinguishes 200 moth species with an accuracy of 93.13% on image cutouts depicting single insects. Combining both in our pipeline improves the accuracy for species identification in images of the moth scanner from 79.62% to 88.05%.
Automated Visual Monitoring of Nocturnal Insects with Light-based Camera Traps
Jul 28, 2023Automatic camera-assisted monitoring of insects for abundance estimations is crucial to understand and counteract ongoing insect decline. In this paper, we present two datasets of nocturnal insects, especially moths as a subset of Lepidoptera, photographed in Central Europe. One of the datasets, the EU-Moths dataset, was captured manually by citizen scientists and contains species annotations for 200 different species and bounding box annotations for those. We used this dataset to develop and evaluate a two-stage pipeline for insect detection and moth species classification in previous work. We further introduce a prototype for an automated visual monitoring system. This prototype produced the second dataset consisting of more than 27,000 images captured on 95 nights. For evaluation and bootstrapping purposes, we annotated a subset of the images with bounding boxes enframing nocturnal insects. Finally, we present first detection and classification baselines for these datasets and encourage other scientists to use this publicly available data.
Simplified Concrete Dropout -- Improving the Generation of Attribution Masks for Fine-grained Classification
Jul 27, 2023Fine-grained classification is a particular case of a classification problem, aiming to classify objects that share the visual appearance and can only be distinguished by subtle differences. Fine-grained classification models are often deployed to determine animal species or individuals in automated animal monitoring systems. Precise visual explanations of the model's decision are crucial to analyze systematic errors. Attention- or gradient-based methods are commonly used to identify regions in the image that contribute the most to the classification decision. These methods deliver either too coarse or too noisy explanations, unsuitable for identifying subtle visual differences reliably. However, perturbation-based methods can precisely identify pixels causally responsible for the classification result. Fill-in of the dropout (FIDO) algorithm is one of those methods. It utilizes the concrete dropout (CD) to sample a set of attribution masks and updates the sampling parameters based on the output of the classification model. A known problem of the algorithm is a high variance in the gradient estimates, which the authors have mitigated until now by mini-batch updates of the sampling parameters. This paper presents a solution to circumvent these computational instabilities by simplifying the CD sampling and reducing reliance on large mini-batch sizes. First, it allows estimating the parameters with smaller mini-batch sizes without losing the quality of the estimates but with a reduced computational effort. Furthermore, our solution produces finer and more coherent attribution masks. Finally, we use the resulting attribution masks to improve the classification performance of a trained model without additional fine-tuning of the model.
End-to-end Learning of a Fisher Vector Encoding for Part Features in Fine-grained Recognition
Jul 04, 2020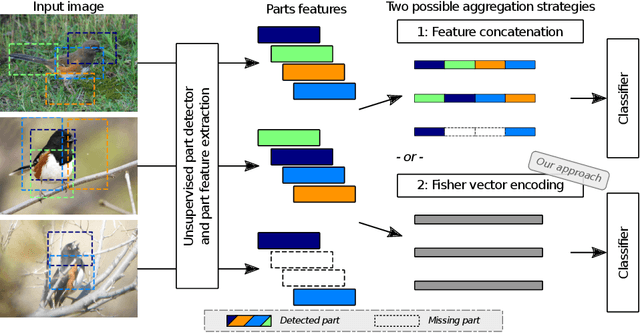
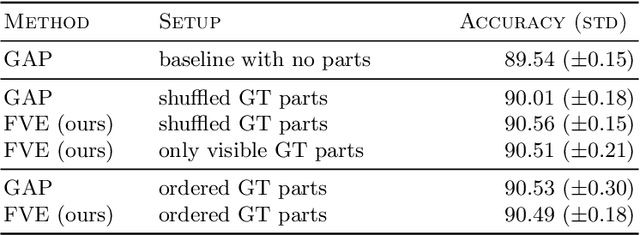
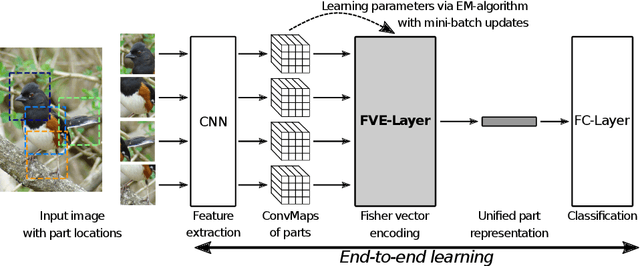
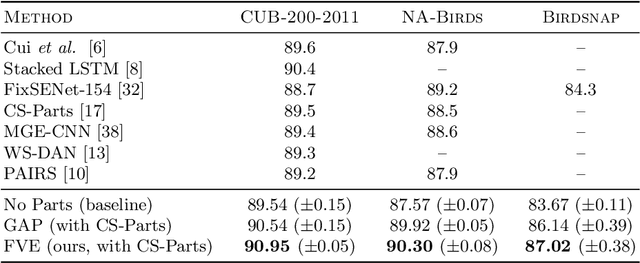
Part-based approaches for fine-grained recognition do not show the expected performance gain over global methods, although being able to explicitly focus on small details that are relevant for distinguishing highly similar classes. We assume that part-based methods suffer from a missing representation of local features, which is invariant to the order of parts and can handle a varying number of visible parts appropriately. The order of parts is artificial and often only given by ground-truth annotations, whereas viewpoint variations and occlusions result in parts that are not observable. Therefore, we propose integrating a Fisher vector encoding of part features into convolutional neural networks. The parameters for this encoding are estimated jointly with those of the neural network in an end-to-end manner. Our approach improves state-of-the-art accuracies for bird species classification on CUB-200-2011 from 90.40\% to 90.95\%, on NA-Birds from 89.20\% to 90.30\%, and on Birdsnap from 84.30\% to 86.97\%.
Classification-Specific Parts for Improving Fine-Grained Visual Categorization
Sep 16, 2019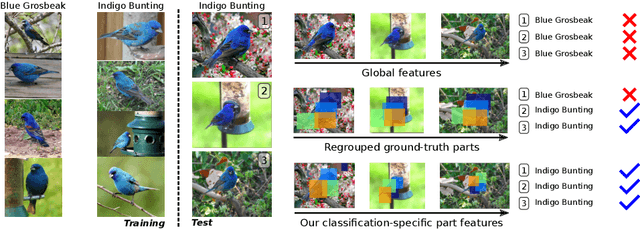
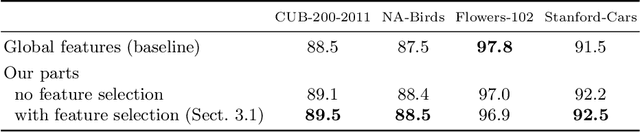
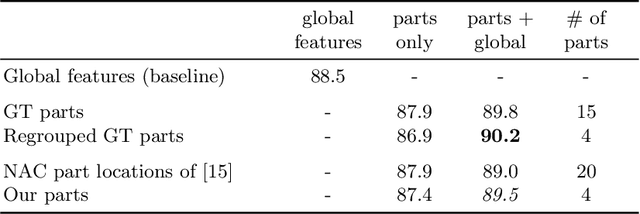
Fine-grained visual categorization is a classification task for distinguishing categories with high intra-class and small inter-class variance. While global approaches aim at using the whole image for performing the classification, part-based solutions gather additional local information in terms of attentions or parts. We propose a novel classification-specific part estimation that uses an initial prediction as well as back-propagation of feature importance via gradient computations in order to estimate relevant image regions. The subsequently detected parts are then not only selected by a-posteriori classification knowledge, but also have an intrinsic spatial extent that is determined automatically. This is in contrast to most part-based approaches and even to available ground-truth part annotations, which only provide point coordinates and no additional scale information. We show in our experiments on various widely-used fine-grained datasets the effectiveness of the mentioned part selection method in conjunction with the extracted part features.