 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCell Behavior Video Classification Challenge, a benchmark for computer vision methods in time-lapse microscopy
Jan 15, 2026The classification of microscopy videos capturing complex cellular behaviors is crucial for understanding and quantifying the dynamics of biological processes over time. However, it remains a frontier in computer vision, requiring approaches that effectively model the shape and motion of objects without rigid boundaries, extract hierarchical spatiotemporal features from entire image sequences rather than static frames, and account for multiple objects within the field of view. To this end, we organized the Cell Behavior Video Classification Challenge (CBVCC), benchmarking 35 methods based on three approaches: classification of tracking-derived features, end-to-end deep learning architectures to directly learn spatiotemporal features from the entire video sequence without explicit cell tracking, or ensembling tracking-derived with image-derived features. We discuss the results achieved by the participants and compare the potential and limitations of each approach, serving as a basis to foster the development of computer vision methods for studying cellular dynamics.
Classification and regression of trajectories rendered as images via 2D Convolutional Neural Networks
Sep 27, 2024Trajectories can be regarded as time-series of coordinates, typically arising from motile objects. Methods for trajectory classification are particularly important to detect different movement patterns, while methods for regression to compute motility metrics and forecasting. Recent advances in computer vision have facilitated the processing of trajectories rendered as images via artificial neural networks with 2d convolutional layers (CNNs). This approach leverages the capability of CNNs to learn spatial hierarchies of features from images, necessary to recognize complex shapes. Moreover, it overcomes the limitation of other machine learning methods that require input trajectories with a fixed number of points. However, rendering trajectories as images can introduce poorly investigated artifacts such as information loss due to the plotting of coordinates on a discrete grid, and spectral changes due to line thickness and aliasing. In this study, we investigate the effectiveness of CNNs for solving classification and regression problems from synthetic trajectories that have been rendered as images using different modalities. The parameters considered in this study include line thickness, image resolution, usage of motion history (color-coding of the temporal component) and anti-aliasing. Results highlight the importance of choosing an appropriate image resolution according to model depth and motion history in applications where movement direction is critical.
ClipBot: an educational, physically impaired robot that learns to walk via genetic algorithm optimization
Oct 26, 2022Educational robots allow experimenting with a variety of principles from mechanics, electronics, and informatics. Here we propose ClipBot, a low-cost, do-it-yourself, robot whose skeleton is made of two paper clips. An Arduino nano microcontroller actuates two servo motors that move the paper clips. However, such mechanical configuration confers physical impairments to movement. This creates the need for and allows experimenting with artificial intelligence methods to overcome hardware limitations. We report our experience in the usage of this robot during the study week 'fascinating informatics', organized by the Swiss Foundation Schweizer Jugend Forscht (www.sjf.ch). Students at the high school level were asked to implement a genetic algorithm to optimize the movements of the robot until it learned to walk. Such a methodology allowed the robot to learn the motor actuation scheme yielding straight movement in the forward direction using less than 20 iterations.
A shortest-path based clustering algorithm for joint human-machine analysis of complex datasets
Dec 31, 2018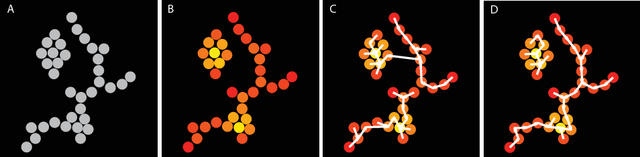
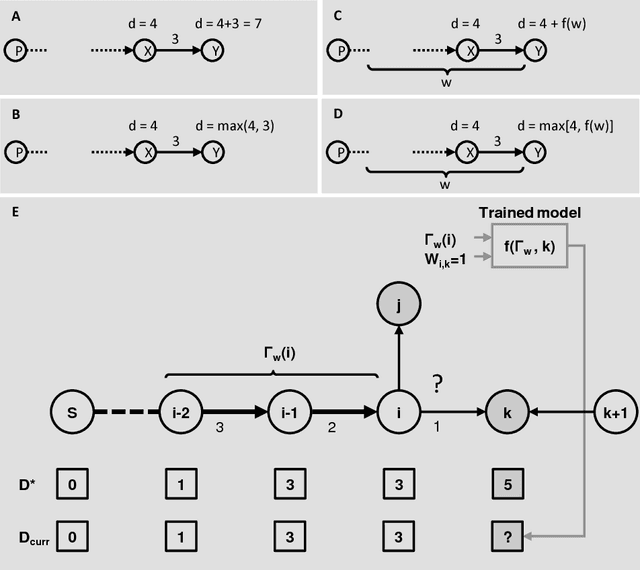
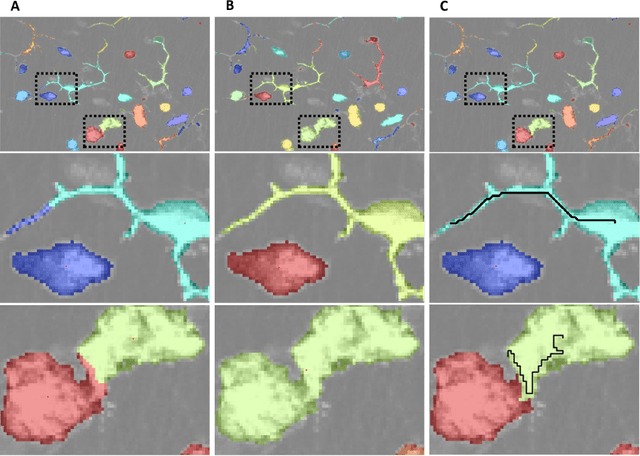
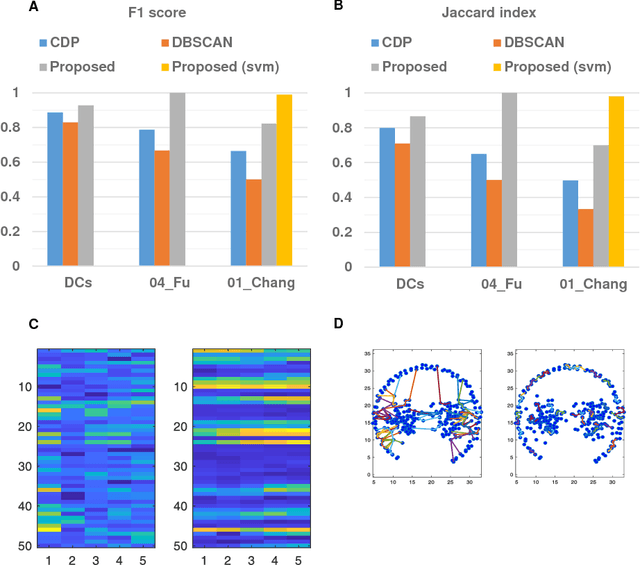
Clustering is a technique for the analysis of datasets obtained by empirical studies in several disciplines with a major application for biomedical research. Essentially, clustering algorithms are executed by machines aiming at finding groups of related points in a dataset. However, the result of grouping depends on both metrics for point-to-point similarity and rules for point-to-group association. Indeed, non-appropriate metrics and rules can lead to undesirable clustering artifacts. This is especially relevant for datasets, where groups with heterogeneous structures co-exist. In this work, we propose an algorithm that achieves clustering by exploring the paths between points. This allows both, to evaluate the properties of the path (such as gaps, density variations, etc.), and expressing the preference for certain paths. Moreover, our algorithm supports the integration of existing knowledge about admissible and non-admissible clusters by training a path classifier. We demonstrate the accuracy of the proposed method on challenging datasets including points from synthetic shapes in publicly available benchmarks and microscopy data.