 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Trajectory Optimization for Legged Robots using Vertex-based ZMP Constraints
May 27, 2017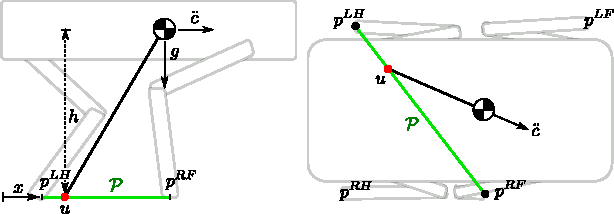
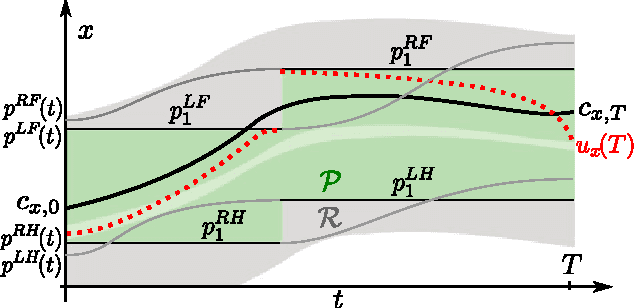
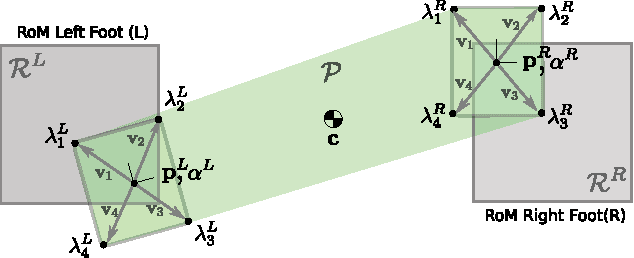
This paper combines the fast Zero-Moment-Point (ZMP) approaches that work well in practice with the broader range of capabilities of a Trajectory Optimization formulation, by optimizing over body motion, footholds and Center of Pressure simultaneously. We introduce a vertex-based representation of the support-area constraint, which can treat arbitrarily oriented point-, line-, and area-contacts uniformly. This generalization allows us to create motions such quadrupedal walking, trotting, bounding, pacing, combinations and transitions between these, limping, bipedal walking and push-recovery all with the same approach. This formulation constitutes a minimal representation of the physical laws (unilateral contact forces) and kinematic restrictions (range of motion) in legged locomotion, which allows us to generate various motion in less than a second. We demonstrate the feasibility of the generated motions on a real quadruped robot.
Evaluating direct transcription and nonlinear optimization methods for robot motion planning
Jan 29, 2016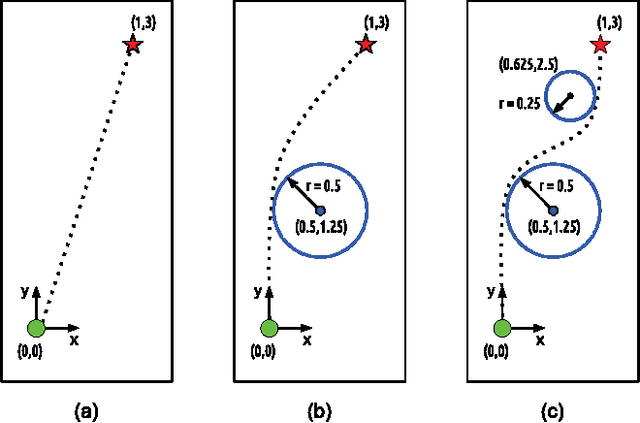
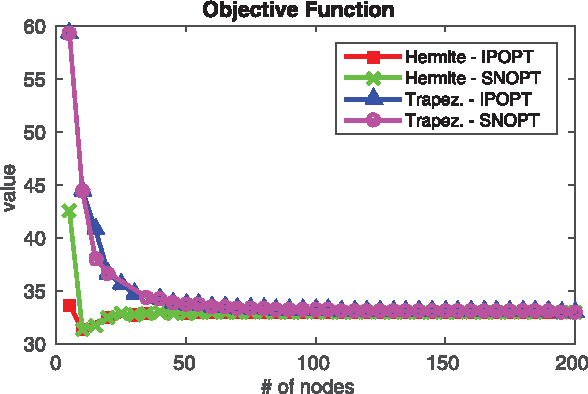

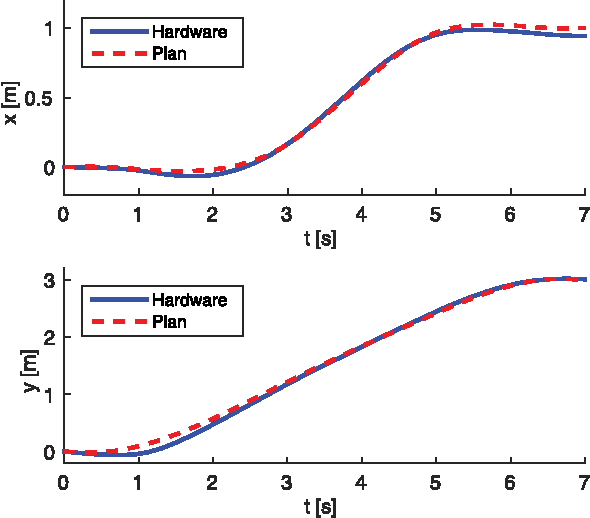
This paper studies existing direct transcription methods for trajectory optimization applied to robot motion planning. There are diverse alternatives for the implementation of direct transcription. In this study we analyze the effects of such alternatives when solving a robotics problem. Different parameters such as integration scheme, number of discretization nodes, initialization strategies and complexity of the problem are evaluated. We measure the performance of the methods in terms of computational time, accuracy and quality of the solution. Additionally, we compare two optimization methodologies frequently used to solve the transcribed problem, namely Sequential Quadratic Programming (SQP) and Interior Point Method (IPM). As a benchmark, we solve different motion tasks on an underactuated and non-minimal-phase ball-balancing robot with a 10 dimensional state space and 3 dimensional input space. Additionally, we validate the results on a simulated 3D quadrotor. Finally, as a verification of using direct transcription methods for trajectory optimization on real robots, we present hardware experiments on a motion task including path constraints and actuation limits.
Projection based whole body motion planning for legged robots
Oct 06, 2015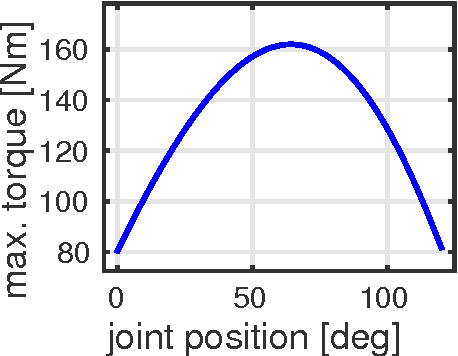
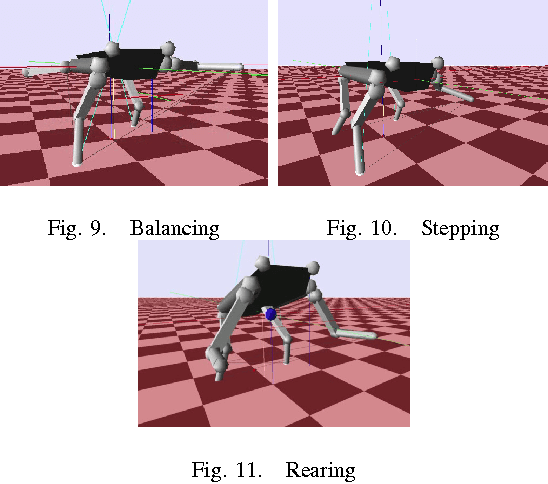
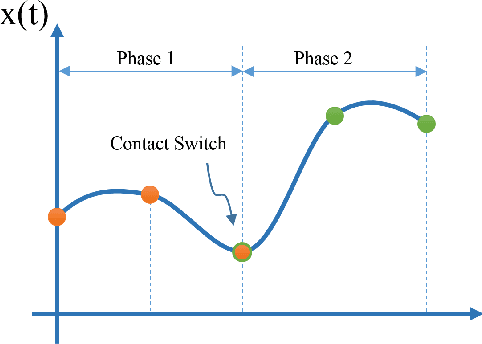
In this paper we present a new approach for dynamic motion planning for legged robots. We formulate a trajectory optimization problem based on a compact form of the robot dynamics. Such a form is obtained by projecting the rigid body dynamics onto the null space of the Constraint Jacobian. As consequence of the projection, contact forces are removed from the model but their effects are still taken into account. This approach permits to solve the optimal control problem of a floating base constrained multibody system while avoiding the use of an explicit contact model. We use direct transcription to numerically solve the optimization. As the contact forces are not part of the decision variables the size of the resultant discrete mathematical program is reduced and therefore solutions can be obtained in a tractable time. Using a predefined sequence of contact configurations (phases), our approach solves motions where contact switches occur. Transitions between phases are automatically resolved without using a model for switching dynamics. We present results on a hydraulic quadruped robot (HyQ), including single phase (standing, crouching) as well as multiple phase (rearing, diagonal leg balancing and stepping) dynamic motions.