 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
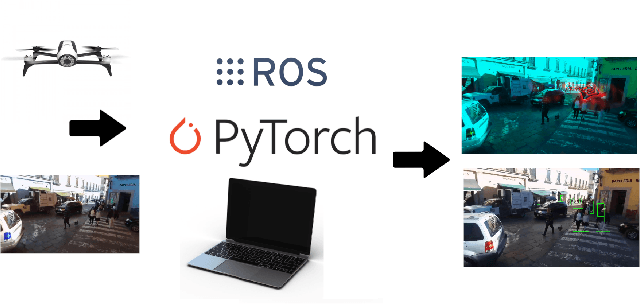
Add to EdgeVision-Based Risk Aware Emergency Landing for UAVs in Complex Urban Environments
May 26, 2025Landing safely in crowded urban environments remains an essential yet challenging endeavor for Unmanned Aerial Vehicles (UAVs), especially in emergency situations. In this work, we propose a risk-aware approach that harnesses semantic segmentation to continuously evaluate potential hazards in the drone's field of view. By using a specialized deep neural network to assign pixel-level risk values and applying an algorithm based on risk maps, our method adaptively identifies a stable Safe Landing Zone (SLZ) despite moving critical obstacles such as vehicles, people, etc., and other visual challenges like shifting illumination. A control system then guides the UAV toward this low-risk region, employing altitude-dependent safety thresholds and temporal landing point stabilization to ensure robust descent trajectories. Experimental validation in diverse urban environments demonstrates the effectiveness of our approach, achieving over 90% landing success rates in very challenging real scenarios, showing significant improvements in various risk metrics. Our findings suggest that risk-oriented vision methods can effectively help reduce the risk of accidents in emergency landing situations, particularly in complex, unstructured, urban scenarios, densely populated with moving risky obstacles, while potentiating the true capabilities of UAVs in complex urban operations.
Aerial Transportation Control of Suspended Payloads with Multiple Agents
Jan 26, 2023



In this paper we address the control problem of aerial cable suspended load transportation, using multiple Unmanned Aerial Vehicles (UAVs). First, the dynamical model of the coupled system is obtained using the Newton-Euler formalism, for "n" UAVs transporting a load, where the cables are supposed to be rigid and mass-less. The control problem is stated as a trajectory tracking directly on the load. To do so, a hierarchical control scheme is proposed based on the attractive ellipsoid method, where a virtual controller is calculated for tracking the position of the load, with this, the desired position for each vehicle along with their desired cable tensions are estimated, and used to compute the virtual controller for the position of each vehicle. This results in an underdetermined system, where an infinite number of drones' configurations comply with the desired load position, thus additional constrains can be imposed to obtain an unique solution. Furthermore, this information is used to compute the attitude reference for the vehicles, which are feed to a quaternion based attitude control. The stability analysis, using an energy-like function, demonstrated the practical stability of the system, it is that all the error signals are attracted and contained in an invariant set. Hence, the proposed scheme assures that, given well posed initial conditions, the closed-loop system guarantees the trajectory tracking of the desired position on the load with bounded errors. The proposed control strategy was evaluated in numerical simulations for three agents following a smooth desired trajectory on the load, showing good performance.
Visual-based Safe Landing for UAVs in Populated Areas: Real-time Validation in Virtual Environments
Mar 25, 2022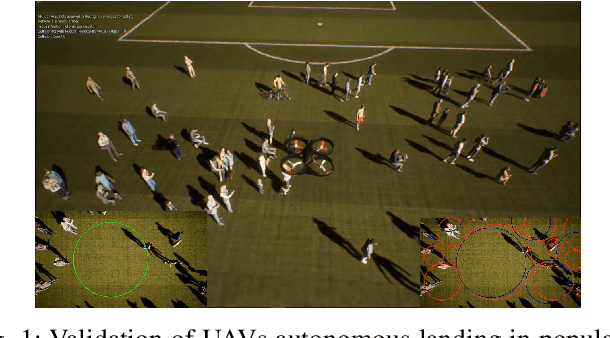



Safe autonomous landing for Unmanned Aerial Vehicles (UAVs) in populated areas is a crucial aspect for successful urban deployment, particularly in emergency landing situations. Nonetheless, validating autonomous landing in real scenarios is a challenging task involving a high risk of injuring people. In this work, we propose a framework for real-time safe and thorough evaluation of vision-based autonomous landing in populated scenarios, using photo-realistic virtual environments. We propose to use the Unreal graphics engine coupled with the AirSim plugin for drone's simulation, and evaluate autonomous landing strategies based on visual detection of Safe Landing Zones (SLZ) in populated scenarios. Then, we study two different criteria for selecting the "best" SLZ, and evaluate them during autonomous landing of a virtual drone in different scenarios and conditions, under different distributions of people in urban scenes, including moving people. We evaluate different metrics to quantify the performance of the landing strategies, establishing a baseline for comparison with future works in this challenging task, and analyze them through an important number of randomized iterations. The study suggests that the use of the autonomous landing algorithms considerably helps to prevent accidents involving humans, which may allow to unleash the full potential of drones in urban environments near to people.
On the Visual-based Safe Landing of UAVs in Populated Areas: a Crucial Aspect for Urban Deployment
Feb 26, 2021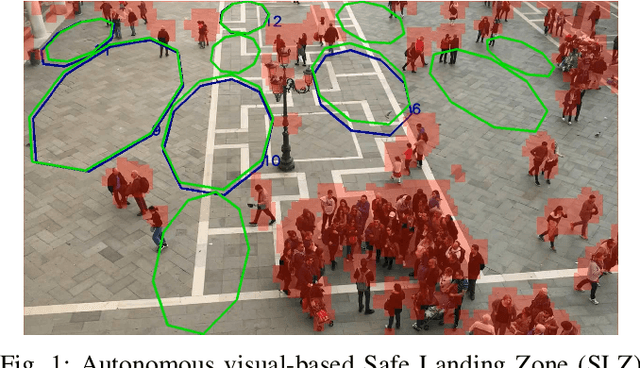
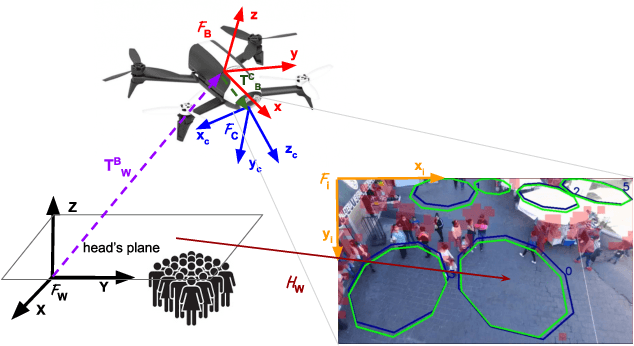
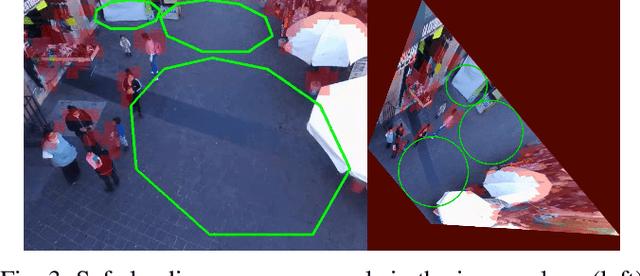
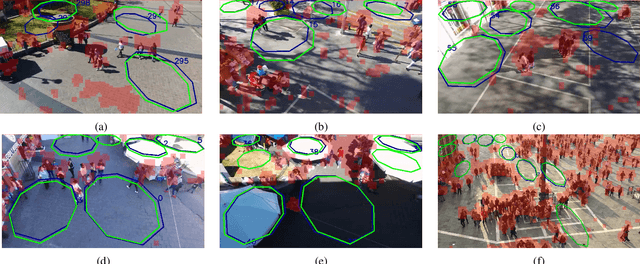
Autonomous landing of Unmanned Aerial Vehicles (UAVs) in crowded scenarios is crucial for successful deployment of UAVs in populated areas, particularly in emergency landing situations where the highest priority is to avoid hurting people. In this work, a new visual-based algorithm for identifying Safe Landing Zones (SLZ) in crowded scenarios is proposed, considering a camera mounted on an UAV, where the people in the scene move with unknown dynamics. To do so, a density map is generated for each image frame using a Deep Neural Network, from where a binary occupancy map is obtained aiming to overestimate the people's location for security reasons. Then, the occupancy map is projected to the head's plane, and the SLZ candidates are obtained as circular regions in the head's plane with a minimum security radius. Finally, to keep track of the SLZ candidates, a multiple instance tracking algorithm is implemented using Kalman Filters along with the Hungarian algorithm for data association. Several scenarios were studied to prove the validity of the proposed strategy, including public datasets and real uncontrolled scenarios with people moving in public squares, taken from an UAV in flight. The study showed promising results in the search of preventing the UAV from hurting people during emergency landing.
Implementation of a Natural User Interface to Command a Drone
Mar 05, 2020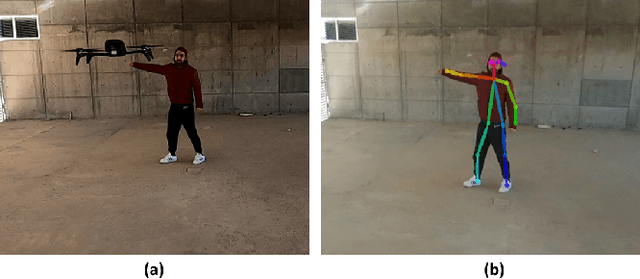

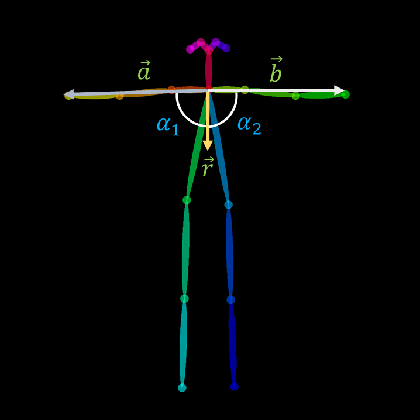
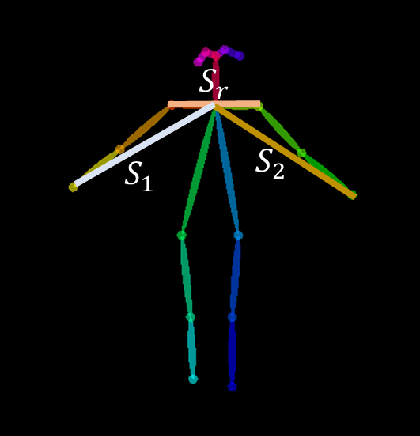
In this work, we propose the use of a Natural User Interface (NUI) through body gestures using the open source library OpenPose, looking for a more dynamic and intuitive way to control a drone. For the implementation, we use the Robotic Operative System (ROS) to control and manage the different components of the project. Wrapped inside ROS, OpenPose (OP) processes the video obtained in real-time by a commercial drone, allowing to obtain the user's pose. Finally, the keypoints from OpenPose are obtained and translated, using geometric constraints, to specify high-level commands to the drone. Real-time experiments validate the full strategy.
Dense Crowds Detection and Surveillance with Drones using Density Maps
Mar 03, 2020


Detecting and Counting people in a human crowd from a moving drone present challenging problems that arisefrom the constant changing in the image perspective andcamera angle. In this paper, we test two different state-of-the-art approaches, density map generation with VGG19 trainedwith the Bayes loss function and detect-then-count with FasterRCNN with ResNet50-FPN as backbone, in order to comparetheir precision for counting and detecting people in differentreal scenarios taken from a drone flight. We show empiricallythat both proposed methodologies perform especially well fordetecting and counting people in sparse crowds when thedrone is near the ground. Nevertheless, VGG19 provides betterprecision on both tasks while also being lighter than FasterRCNN. Furthermore, VGG19 outperforms Faster RCNN whendealing with dense crowds, proving to be more robust toscale variations and strong occlusions, being more suitable forsurveillance applications using drones