 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Visual-based Safe Landing of UAVs in Populated Areas: a Crucial Aspect for Urban Deployment
Paper and Code
Feb 26, 2021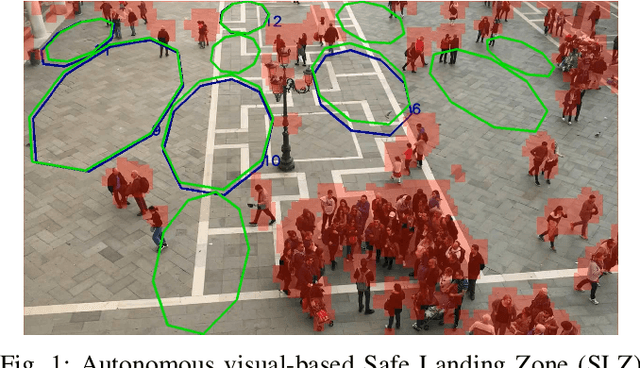
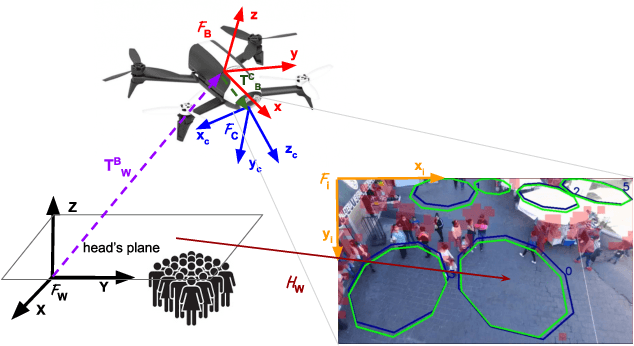
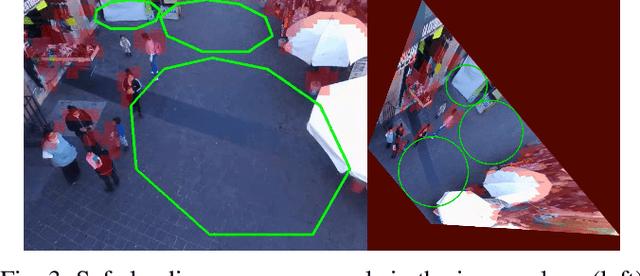
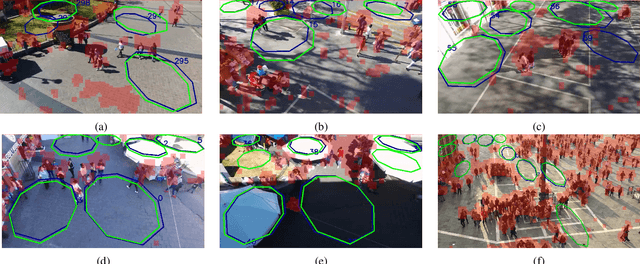
Autonomous landing of Unmanned Aerial Vehicles (UAVs) in crowded scenarios is crucial for successful deployment of UAVs in populated areas, particularly in emergency landing situations where the highest priority is to avoid hurting people. In this work, a new visual-based algorithm for identifying Safe Landing Zones (SLZ) in crowded scenarios is proposed, considering a camera mounted on an UAV, where the people in the scene move with unknown dynamics. To do so, a density map is generated for each image frame using a Deep Neural Network, from where a binary occupancy map is obtained aiming to overestimate the people's location for security reasons. Then, the occupancy map is projected to the head's plane, and the SLZ candidates are obtained as circular regions in the head's plane with a minimum security radius. Finally, to keep track of the SLZ candidates, a multiple instance tracking algorithm is implemented using Kalman Filters along with the Hungarian algorithm for data association. Several scenarios were studied to prove the validity of the proposed strategy, including public datasets and real uncontrolled scenarios with people moving in public squares, taken from an UAV in flight. The study showed promising results in the search of preventing the UAV from hurting people during emergency landing.