 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial Transportation Control of Suspended Payloads with Multiple Agents
Jan 26, 2023



In this paper we address the control problem of aerial cable suspended load transportation, using multiple Unmanned Aerial Vehicles (UAVs). First, the dynamical model of the coupled system is obtained using the Newton-Euler formalism, for "n" UAVs transporting a load, where the cables are supposed to be rigid and mass-less. The control problem is stated as a trajectory tracking directly on the load. To do so, a hierarchical control scheme is proposed based on the attractive ellipsoid method, where a virtual controller is calculated for tracking the position of the load, with this, the desired position for each vehicle along with their desired cable tensions are estimated, and used to compute the virtual controller for the position of each vehicle. This results in an underdetermined system, where an infinite number of drones' configurations comply with the desired load position, thus additional constrains can be imposed to obtain an unique solution. Furthermore, this information is used to compute the attitude reference for the vehicles, which are feed to a quaternion based attitude control. The stability analysis, using an energy-like function, demonstrated the practical stability of the system, it is that all the error signals are attracted and contained in an invariant set. Hence, the proposed scheme assures that, given well posed initial conditions, the closed-loop system guarantees the trajectory tracking of the desired position on the load with bounded errors. The proposed control strategy was evaluated in numerical simulations for three agents following a smooth desired trajectory on the load, showing good performance.
A New Exocentric Metaphor for Complex Path Following to Control a UAV Using Mixed Reality
Feb 13, 2020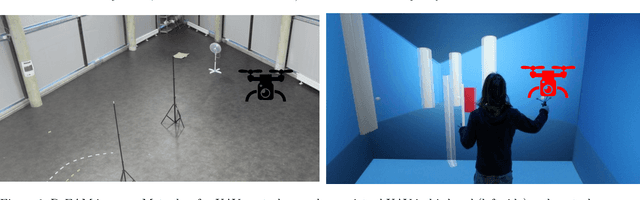
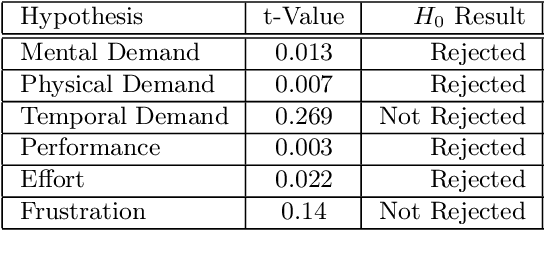
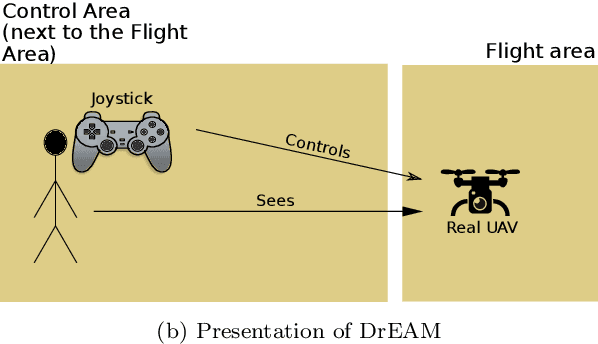
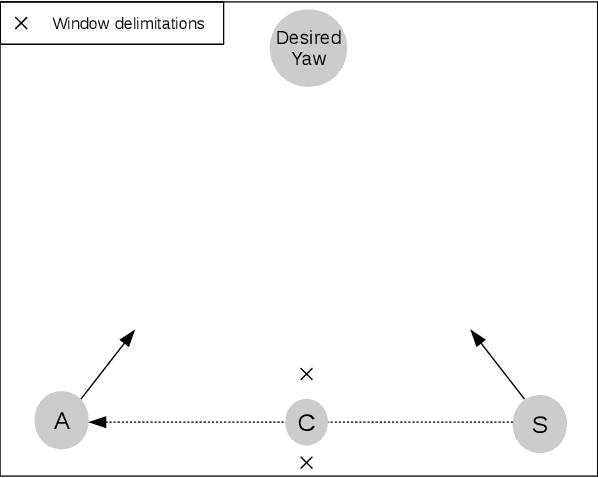
Teleoperation of Unmanned Aerial Vehicles (UAVs) has recently become an noteworthly research topic in the field of human robot interaction. Each year, a variety of devices is being studied to design adapted interface for diverse purpose such as view taking, search and rescue operation or suveillance. New interfaces have to be precise, simple and intuitive even for complex path planning. Moreover, when teleoperation involves long distance control, user needs to get proper feedbacks and avoid motion sickness. In order to overcome all these challenges, a new interaction metaphor named DrEAM (Drone Exocentric Advanced Metaphor) was designed. User can see the UAV he is controlling in a virtual environment mapped to the real world. He can interact with it as a simple object in a classical virtual world. An experiment was lead in order to evaluate the perfomances of this metaphor, comparing performance of novice user using either a direct-view joystick control or using DrEAM.
Cloud-based Evolutionary Algorithms: An algorithmic study
May 31, 2011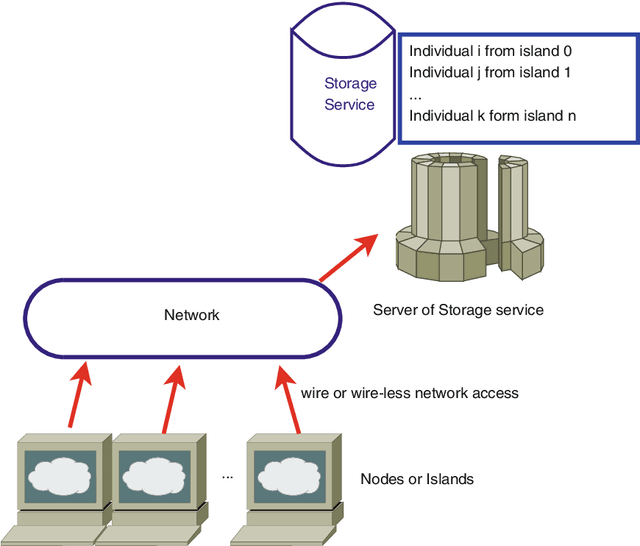
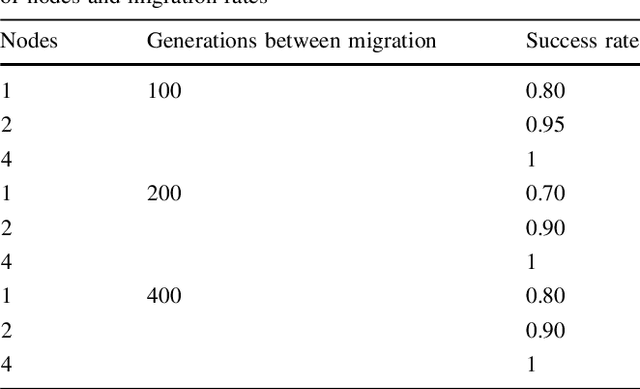
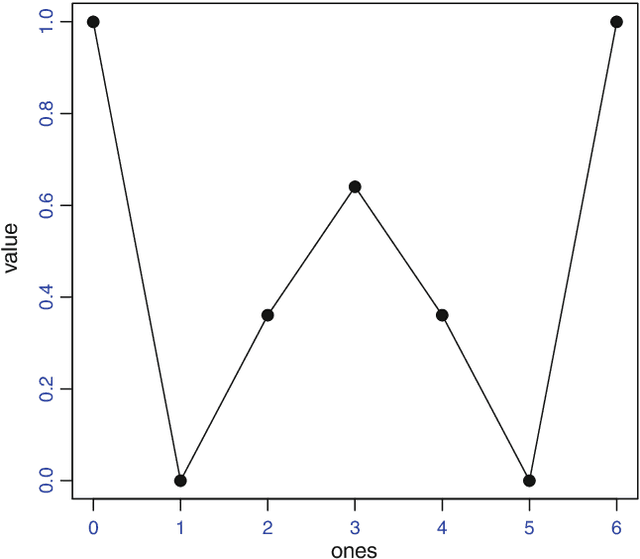
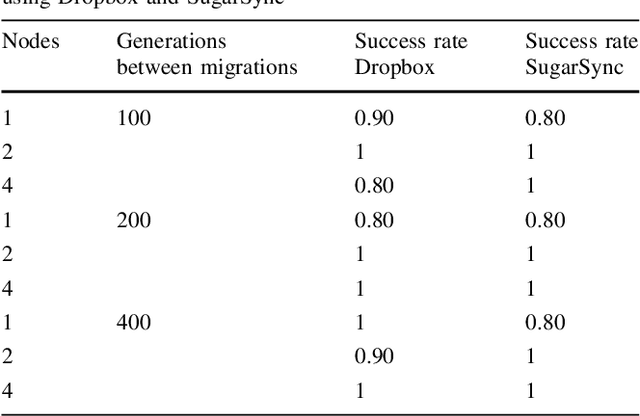
After a proof of concept using Dropbox(tm), a free storage and synchronization service, showed that an evolutionary algorithm using several dissimilar computers connected via WiFi or Ethernet had a good scaling behavior in terms of evaluations per second, it remains to be proved whether that effect also translates to the algorithmic performance of the algorithm. In this paper we will check several different, and difficult, problems, and see what effects the automatic load-balancing and asynchrony have on the speed of resolution of problems.
Improved evolutionary generation of XSLT stylesheets
Mar 13, 2008

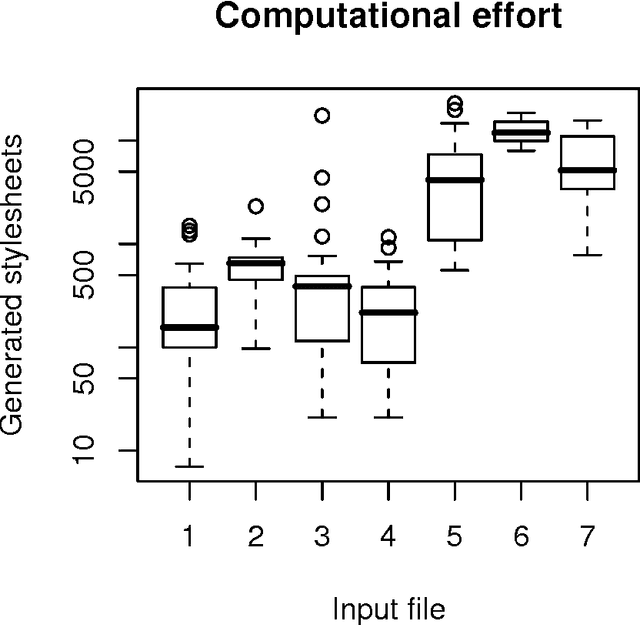
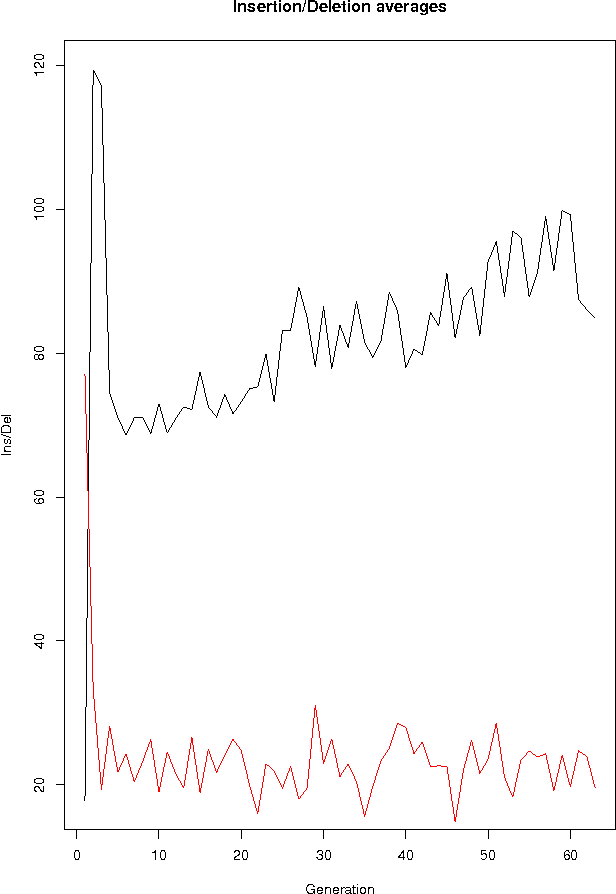
This paper introduces a procedure based on genetic programming to evolve XSLT programs (usually called stylesheets or logicsheets). XSLT is a general purpose, document-oriented functional language, generally used to transform XML documents (or, in general, solve any problem that can be coded as an XML document). The proposed solution uses a tree representation for the stylesheets as well as diverse specific operators in order to obtain, in the studied cases and a reasonable time, a XSLT stylesheet that performs the transformation. Several types of representation have been compared, resulting in different performance and degree of success.