 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMTA-RL: Robust Urban Driving via Multi-modal Transformer-based 3D Affordances and Reinforcement Learning
May 11, 2026Robust urban autonomous driving requires reliable 3D scene understanding and stable decision-making under dense interactions. However, existing end-to-end models lack interpretability, while modular pipelines suffer from error propagation across brittle interfaces. This paper proposes MTA-RL, the first framework that bridges perception and control through Multi-modal Transformer-based 3D Affordances and Reinforcement Learning (RL). Unlike previous fusion models that directly regress actions, RGB images and LiDAR point clouds are fused using a transformer architecture to predict explicit, geometry-aware affordance representations. These structured representations serve as a compact observation space, enabling the RL policy to operate purely on predicted driving semantics, which significantly improves sample efficiency and stability. Extensive evaluations in CARLA Town01-03 across varying densities (20-60 background vehicles) show that MTA-RL consistently outperforms state-of-the-art baselines. Trained solely on Town03, our method demonstrates superior zero-shot generalization in unseen towns, achieving up to a 9.0% increase in Route Completion, an 11.0% increase in Total Distance, and an 83.7% improvement in Distance Per Violation. Furthermore, ablation studies confirm that our multi-modal fusion and reward shaping are critical, significantly outperforming image-only and unshaped variants, demonstrating the effectiveness of MTA-RL for robust urban autonomous driving.
Towards Autonomous Driving with Small-Scale Cars: A Survey of Recent Development
Apr 09, 2024While engaging with the unfolding revolution in autonomous driving, a challenge presents itself, how can we effectively raise awareness within society about this transformative trend? While full-scale autonomous driving vehicles often come with a hefty price tag, the emergence of small-scale car platforms offers a compelling alternative. These platforms not only serve as valuable educational tools for the broader public and young generations but also function as robust research platforms, contributing significantly to the ongoing advancements in autonomous driving technology. This survey outlines various small-scale car platforms, categorizing them and detailing the research advancements accomplished through their usage. The conclusion provides proposals for promising future directions in the field.
Vision-based DRL Autonomous Driving Agent with Sim2Real Transfer
May 19, 2023To achieve fully autonomous driving, vehicles must be capable of continuously performing various driving tasks, including lane keeping and car following, both of which are fundamental and well-studied driving ones. However, previous studies have mainly focused on individual tasks, and car following tasks have typically relied on complete leader-follower information to attain optimal performance. To address this limitation, we propose a vision-based deep reinforcement learning (DRL) agent that can simultaneously perform lane keeping and car following maneuvers. To evaluate the performance of our DRL agent, we compare it with a baseline controller and use various performance metrics for quantitative analysis. Furthermore, we conduct a real-world evaluation to demonstrate the Sim2Real transfer capability of the trained DRL agent. To the best of our knowledge, our vision-based car following and lane keeping agent with Sim2Real transfer capability is the first of its kind.
A Platform-Agnostic Deep Reinforcement Learning Framework for Effective Sim2Real Transfer in Autonomous Driving
Apr 14, 2023Deep Reinforcement Learning (DRL) has shown remarkable success in solving complex tasks across various research fields. However, transferring DRL agents to the real world is still challenging due to the significant discrepancies between simulation and reality. To address this issue, we propose a robust DRL framework that leverages platform-dependent perception modules to extract task-relevant information and train a lane-following and overtaking agent in simulation. This framework facilitates the seamless transfer of the DRL agent to new simulated environments and the real world with minimal effort. We evaluate the performance of the agent in various driving scenarios in both simulation and the real world, and compare it to human players and the PID baseline in simulation. Our proposed framework significantly reduces the gaps between different platforms and the Sim2Real gap, enabling the trained agent to achieve similar performance in both simulation and the real world, driving the vehicle effectively.
DDPG car-following model with real-world human driving experience in CARLA
Dec 29, 2021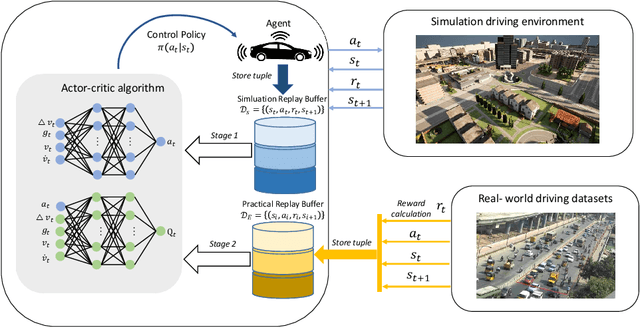
In the autonomous driving field, the fusion of human knowledge into Deep Reinforcement Learning (DRL) is often based on the human demonstration recorded in the simulated environment. This limits the generalization and the feasibility of application in real-world traffic. We proposed a two-stage DRL method, that learns from real-world human driving to achieve performance that is superior to the pure DRL agent. Training a DRL agent is done within a framework for CARLA with Robot Operating System (ROS). For evaluation, we designed different real-world driving scenarios to compare the proposed two-stage DRL agent with the pure DRL agent. After extracting the 'good' behavior from the human driver, such as anticipation in a signalized intersection, the agent becomes more efficient and drives safer, which makes this autonomous agent more adapt to Human-Robot Interaction (HRI) traffic.
Where am I? SLAM for Mobile Machines on A Smart Working Site
Nov 05, 2020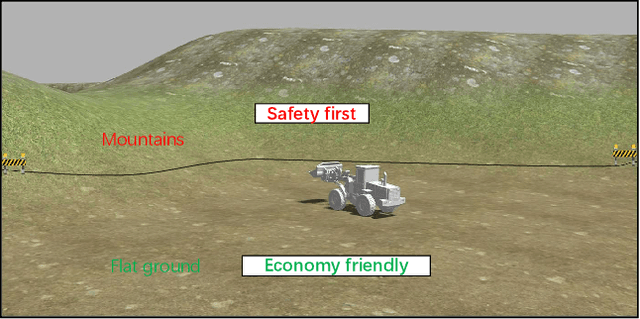
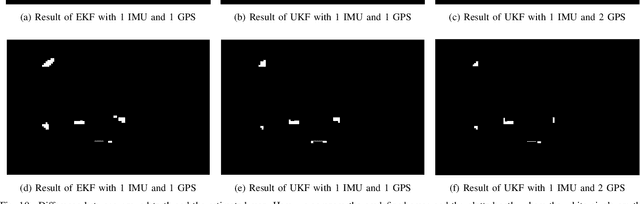
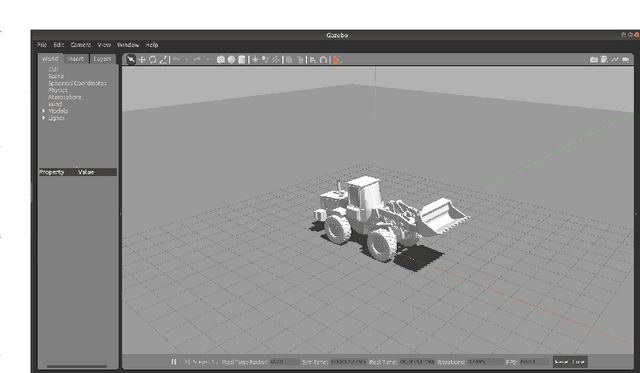
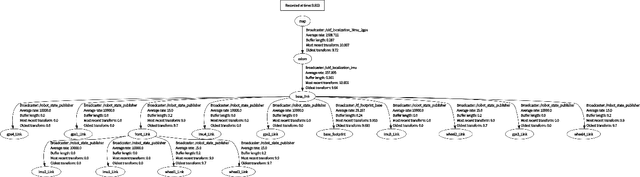
The current optimization approaches of construction machinery are mainly based on internal sensors. However, the decision of a reasonable strategy is not only determined by its intrinsic signals, but also very strongly by environmental information, especially the terrain. Due to the dynamically changing of the construction site and the consequent absence of a high definition map, the Simultaneous Localization and Mapping (SLAM) offering the terrain information for construction machines is still challenging. Current SLAM technologies proposed for mobile machines are strongly dependent on costly or computationally expensive sensors, such as RTK GPS and cameras, so that commercial use is rare. In this study, we proposed an affordable SLAM method to create a multi-layer gird map for the construction site so that the machine can have the environmental information and be optimized accordingly. Concretely, after the machine passes by, we can get the local information and record it. Combining with positioning technology, we then create a map of the interesting places of the construction site. As a result of our research gathered from Gazebo, we showed that a suitable layout is the combination of 1 IMU and 2 differential GPS antennas using the unscented Kalman filter, which keeps the average distance error lower than 2m and the mapping error lower than 1.3% in the harsh environment. As an outlook, our SLAM technology provides the cornerstone to activate many efficiency improvement approaches.