 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalibration of Human Driving Behavior and Preference Using Naturalistic Traffic Data
May 05, 2021
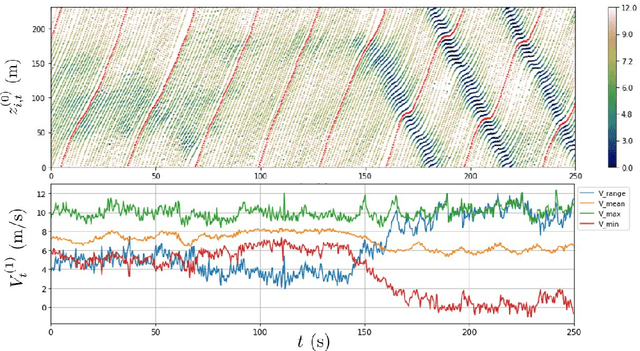
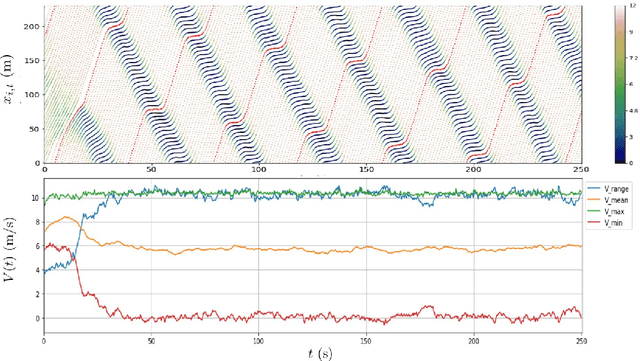
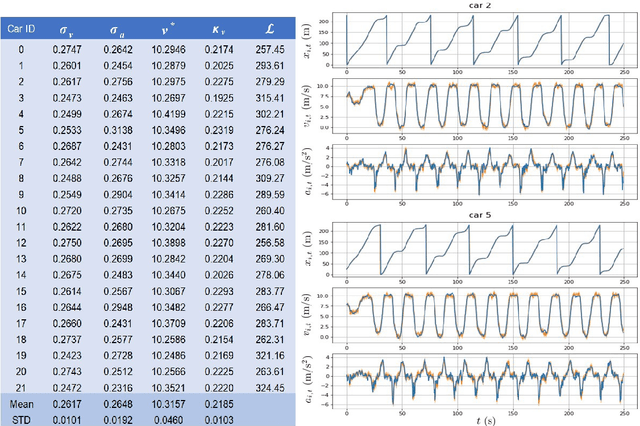
Understanding human driving behaviors quantitatively is critical even in the era when connected and autonomous vehicles and smart infrastructure are becoming ever more prevalent. This is particularly so as that mixed traffic settings, where autonomous vehicles and human driven vehicles co-exist, are expected to persist for quite some time. Towards this end it is necessary that we have a comprehensive modeling framework for decision-making within which human driving preferences can be inferred statistically from observed driving behaviors in realistic and naturalistic traffic settings. Leveraging a recently proposed computational framework for smart vehicles in a smart world using multi-agent based simulation and optimization, we first recapitulate how the forward problem of driving decision-making is modeled as a state space model. We then show how the model can be inverted to estimate driver preferences from naturalistic traffic data using the standard Kalman filter technique. We explicitly illustrate our approach using the vehicle trajectory data from Sugiyama experiment that was originally meant to demonstrate how stop-and-go shockwave can arise spontaneously without bottlenecks. Not only the estimated state filter can fit the observed data well for each individual vehicle, the inferred utility functions can also re-produce quantitatively similar pattern of the observed collective behaviors. One distinct advantage of our approach is the drastically reduced computational burden. This is possible because our forward model treats driving decision process, which is intrinsically dynamic with multi-agent interactions, as a sequence of independent static optimization problems contingent on the state with a finite look ahead anticipation. Consequently we can practically sidestep solving an interacting dynamic inversion problem that would have been much more computationally demanding.