 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCycleGAN for Interpretable Online EMT Compensation
Jan 05, 2021



Purpose: Electromagnetic Tracking (EMT) can partially replace X-ray guidance in minimally invasive procedures, reducing radiation in the OR. However, in this hybrid setting, EMT is disturbed by metallic distortion caused by the X-ray device. We plan to make hybrid navigation clinical reality to reduce radiation exposure for patients and surgeons, by compensating EMT error. Methods: Our online compensation strategy exploits cycle-consistent generative adversarial neural networks (CycleGAN). 3D positions are translated from various bedside environments to their bench equivalents. Domain-translated points are fine-tuned to reduce error in the bench domain. We evaluate our compensation approach in a phantom experiment. Results: Since the domain-translation approach maps distorted points to their lab equivalents, predictions are consistent among different C-arm environments. Error is successfully reduced in all evaluation environments. Our qualitative phantom experiment demonstrates that our approach generalizes well to an unseen C-arm environment. Conclusion: Adversarial, cycle-consistent training is an explicable, consistent and thus interpretable approach for online error compensation. Qualitative assessment of EMT error compensation gives a glimpse to the potential of our method for rotational error compensation.
RGait-NET: An Effective Network for Recovering Missing Information from Occluded Gait Cycles
Jan 20, 2020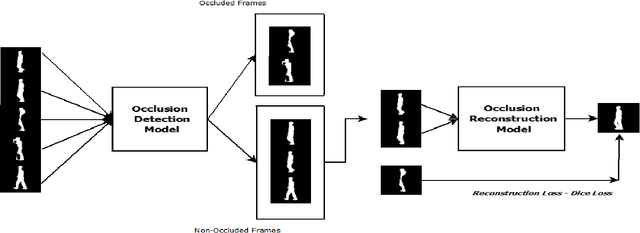
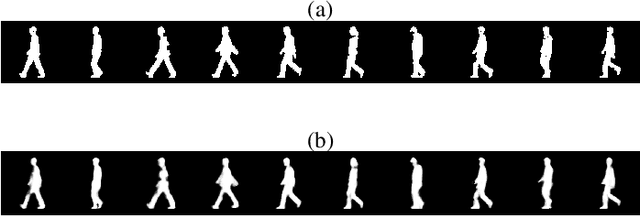
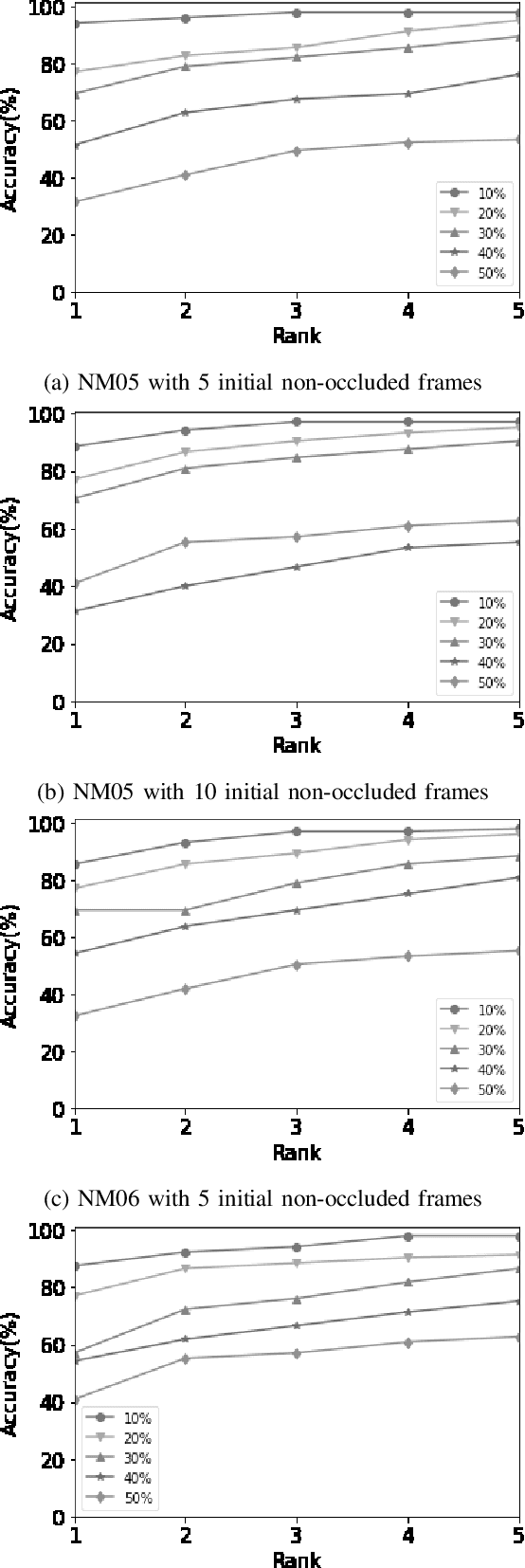
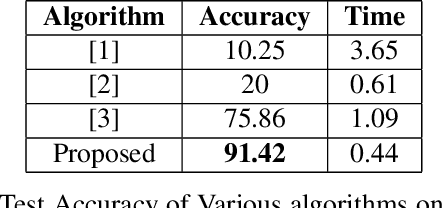
Gait of a person refers to his/her walking pattern, and according to medical studies gait of every individual is unique. Over the past decade, several computer vision-based gait recognition approaches have been proposed in which walking information corresponding to a complete gait cycle has been used to construct gait features for person identification. These methods compute gait features with the inherent assumption that a complete gait cycle is always available. However, in most public places occlusion is an inevitable occurrence, and due to this, only a fraction of a gait cycle gets captured by the monitoring camera. Unavailability of complete gait cycle information drastically affects the accuracy of the extracted features, and till date, only a few occlusion handling strategies to gait recognition have been proposed. But none of these performs reliably and robustly in the presence of a single cycle with incomplete information, and because of this practical application of gait recognition is quite limited. In this work, we develop deep learning-based algorithm to accurately identify the affected frames as well as predict the missing frames to reconstruct a complete gait cycle. While occlusion detection has been carried out by employing a VGG-16 model, the model for frame reconstruction is based on Long-Short Term Memory network that has been trained to optimize a multi-objective function based on dice coefficient and cross-entropy loss. The effectiveness of the proposed occlusion reconstruction algorithm is evaluated by computing the accuracy of the popular Gait Energy Feature on the reconstructed sequence. Experimental evaluation on public data sets and comparative analysis with other occlusion handling methods verify the effectiveness of our approach.