 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvidentia -- A Large Scale Sensing System for the Assistance of Autonomous Vehicles
Jun 19, 2019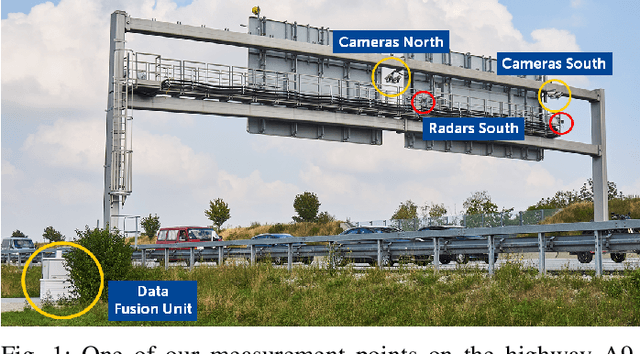
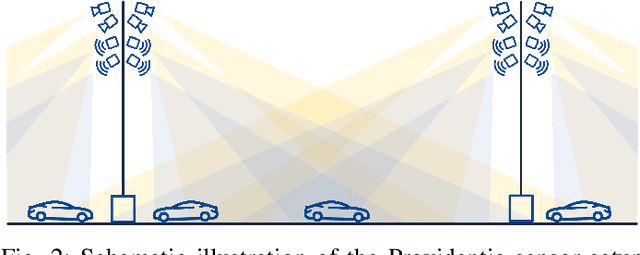
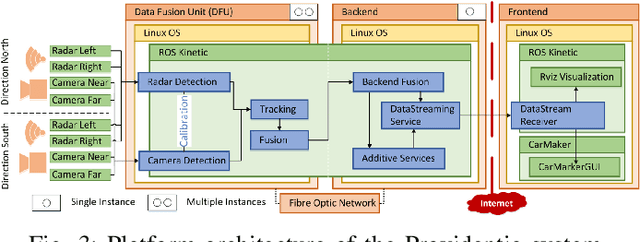
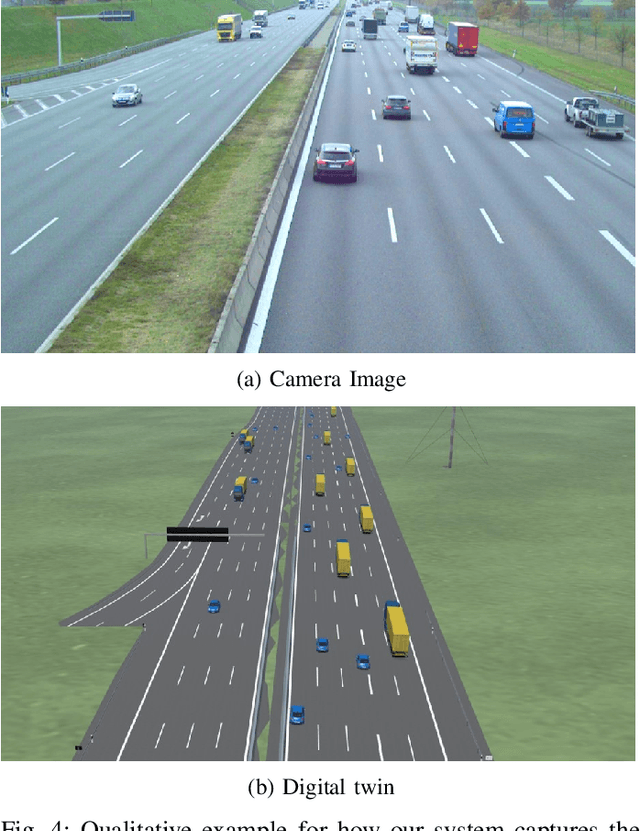
The environmental perception of autonomous vehicles is not only limited by physical sensor ranges and algorithmic performance, but also occlusions degrade their understanding of the current traffic situation. This poses a great threat for safety, limits their driving speed and can lead to inconvenient maneuvers that decrease their acceptance. Intelligent Transportation Systems can help to alleviate these problems. By providing autonomous vehicles with additional detailed information about the current traffic in form of a digital model of their world, i.e. a digital twin, an Intelligent Transportation System can fill in the gaps in the vehicle's perception and enhance its field of view. However, detailed descriptions of implementations of such a system and working prototypes demonstrating its feasibility are scarce. In this work, we propose a hardware and software architecture to build such a reliable Intelligent Transportation System. We have implemented this system in the real world and show that it is able to create an accurate digital twin of an extended highway stretch. Furthermore, we provide this digital twin to an autonomous vehicle and demonstrate how it extends the vehicle's perception beyond the limits of its on-board sensors.
Architecting Dependable Learning-enabled Autonomous Systems: A Survey
Feb 27, 2019
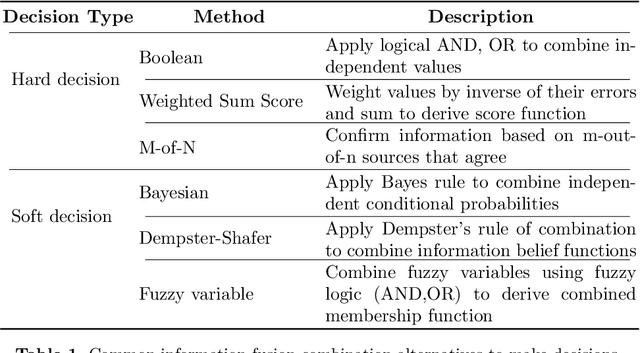

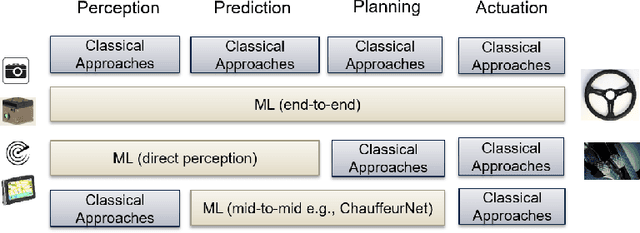
We provide a summary over architectural approaches that can be used to construct dependable learning-enabled autonomous systems, with a focus on automated driving. We consider three technology pillars for architecting dependable autonomy, namely diverse redundancy, information fusion, and runtime monitoring. For learning-enabled components, we additionally summarize recent architectural approaches to increase the dependability beyond standard convolutional neural networks. We conclude the study with a list of promising research directions addressing the challenges of existing approaches.