 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning-Based Air Traffic Deconfliction
Jan 05, 2023Remain Well Clear, keeping the aircraft away from hazards by the appropriate separation distance, is an essential technology for the safe operation of uncrewed aerial vehicles in congested airspace. This work focuses on automating the horizontal separation of two aircraft and presents the obstacle avoidance problem as a 2D surrogate optimization task. By our design, the surrogate task is made more conservative to guarantee the execution of the solution in the primary domain. Using Reinforcement Learning (RL), we optimize the avoidance policy and model the dynamics, interactions, and decision-making. By recursively sampling the resulting policy and the surrogate transitions, the system translates the avoidance policy into a complete avoidance trajectory. Then, the solver publishes the trajectory as a set of waypoints for the airplane to follow using the Robot Operating System (ROS) interface. The proposed system generates a quick and achievable avoidance trajectory that satisfies the safety requirements. Evaluation of our system is completed in a high-fidelity simulation and full-scale airplane demonstration. Moreover, the paper concludes an enormous integration effort that has enabled a real-life demonstration of the RL-based system.
Formal Analysis and Redesign of a Neural Network-Based Aircraft Taxiing System with VerifAI
May 14, 2020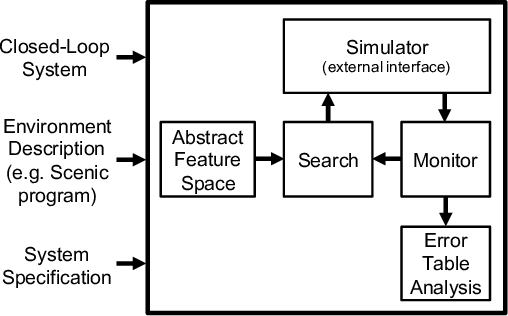
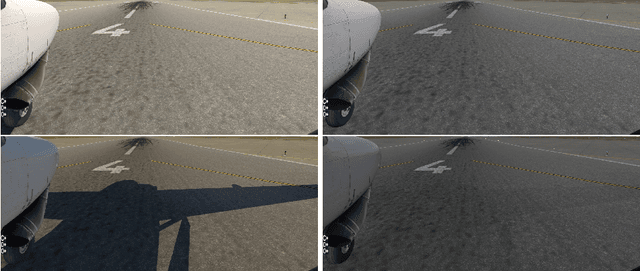
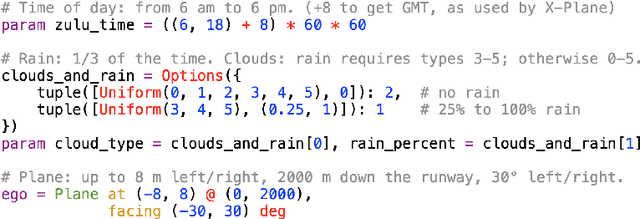
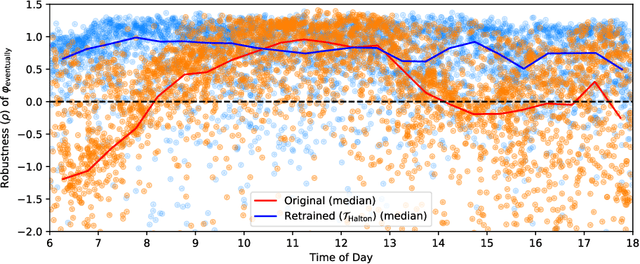
We demonstrate a unified approach to rigorous design of safety-critical autonomous systems using the VerifAI toolkit for formal analysis of AI-based systems. VerifAI provides an integrated toolchain for tasks spanning the design process, including modeling, falsification, debugging, and ML component retraining. We evaluate all of these applications in an industrial case study on an experimental autonomous aircraft taxiing system developed by Boeing, which uses a neural network to track the centerline of a runway. We define runway scenarios using the Scenic probabilistic programming language, and use them to drive tests in the X-Plane flight simulator. We first perform falsification, automatically finding environment conditions causing the system to violate its specification by deviating significantly from the centerline (or even leaving the runway entirely). Next, we use counterexample analysis to identify distinct failure cases, and confirm their root causes with specialized testing. Finally, we use the results of falsification and debugging to retrain the network, eliminating several failure cases and improving the overall performance of the closed-loop system.