 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-optimal Convexified Reeds-Shepp Paths on a Sphere
Apr 01, 2025



This article addresses time-optimal path planning for a vehicle capable of moving both forward and backward on a unit sphere with a unit maximum speed, and constrained by a maximum absolute turning rate $U_{max}$. The proposed formulation can be utilized for optimal attitude control of underactuated satellites, optimal motion planning for spherical rolling robots, and optimal path planning for mobile robots on spherical surfaces or uneven terrains. By utilizing Pontryagin's Maximum Principle and analyzing phase portraits, it is shown that for $U_{max}\geq1$, the optimal path connecting a given initial configuration to a desired terminal configuration falls within a sufficient list of 23 path types, each comprising at most 6 segments. These segments belong to the set $\{C,G,T\}$, where $C$ represents a tight turn with radius $r=\frac{1}{\sqrt{1+U_{max}^2}}$, $G$ represents a great circular arc, and $T$ represents a turn-in-place motion. Closed-form expressions for the angles of each path in the sufficient list are derived. The source code for solving the time-optimal path problem and visualization is publicly available at https://github.com/sixuli97/Optimal-Spherical-Convexified-Reeds-Shepp-Paths.
The Weighted Markov-Dubins Problem
Nov 13, 2022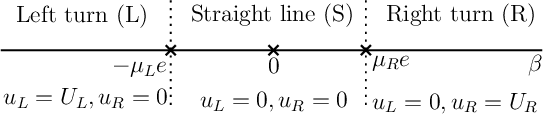
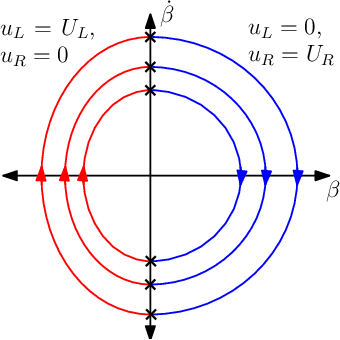
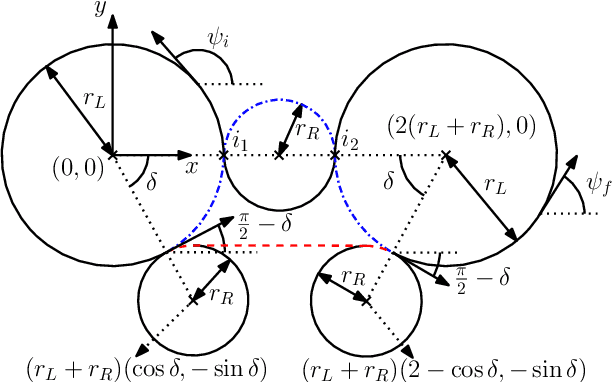
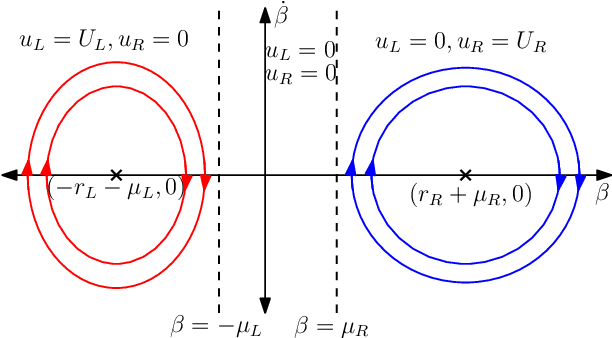
In this article, a variation of the classical Markov-Dubins problem is considered, which deals with curvature-constrained least-cost paths in a plane with prescribed initial and final configurations, different bounds for the sinistral and dextral curvatures, and penalties $\mu_L$ and $\mu_R$ for the sinistral and dextral turns, respectively. The addressed problem generalizes the classical Markov-Dubins problem and the asymmetric sinistral/dextral Markov-Dubins problem. The proposed formulation can be used to model an Unmanned Aerial Vehicle (UAV) with a penalty associated with a turn due to a loss in altitude while turning or a UAV with different costs for the sinistral and dextral turns due to hardware failures or environmental conditions. Using optimal control theory, the main result of this paper shows that the optimal path belongs to a set of at most $21$ candidate paths, each comprising of at most five segments. Unlike in the classical Markov-Dubins problem, the $CCC$ path, which is a candidate path for the classical Markov-Dubins problem, is not optimal for the weighted Markov-Dubins problem. Moreover, the obtained list of candidate paths for the weighted Markov-Dubins problem reduces to the standard $CSC$ and $CCC$ paths and the corresponding degenerate paths when $\mu_L$ and $\mu_R$ approach zero.