 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Structural Points Representation for Graph-based Semantic Monocular Localization and Mapping
Jun 21, 2022
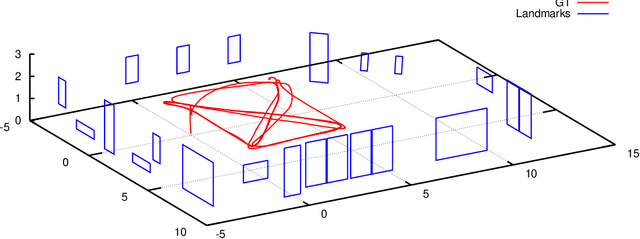

Efficient object level representation for monocular semantic simultaneous localization and mapping (SLAM) still lacks a widely accepted solution. In this paper, we propose the use of an efficient representation, based on structural points, for the geometry of objects to be used as landmarks in a monocular semantic SLAM system based on the pose-graph formulation. In particular, an inverse depth parametrization is proposed for the landmark nodes in the pose-graph to store object position, orientation and size/scale. The proposed formulation is general and it can be applied to different geometries; in this paper we focus on indoor environments where human-made artifacts commonly share a planar rectangular shape, e.g., windows, doors, cabinets, etc. The approach can be easily extended to urban scenarios where similar shapes exists as well. Experiments in simulation show good performance, particularly in object geometry reconstruction.
LiDAR Point--to--point Correspondences for Rigorous Registration of Kinematic Scanning in Dynamic Networks
Jan 03, 2022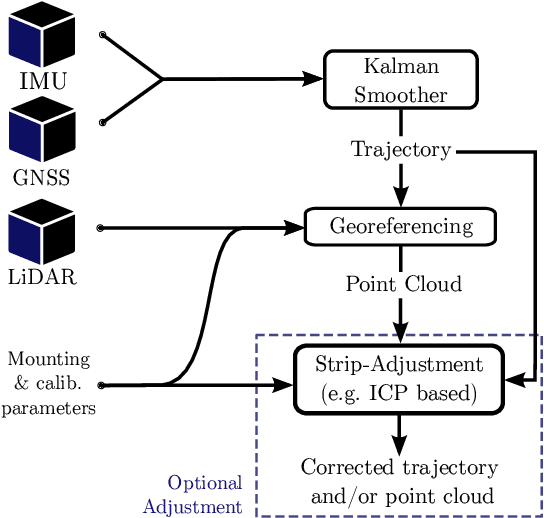

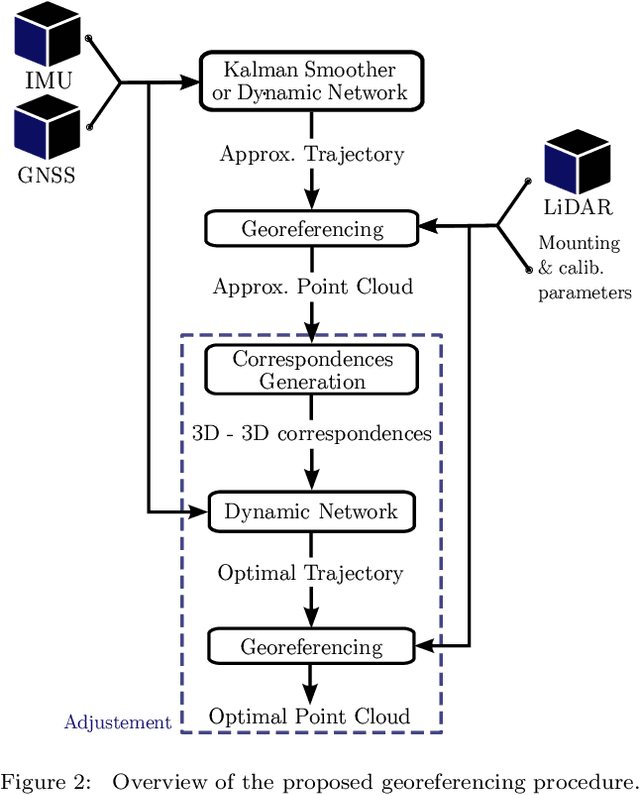

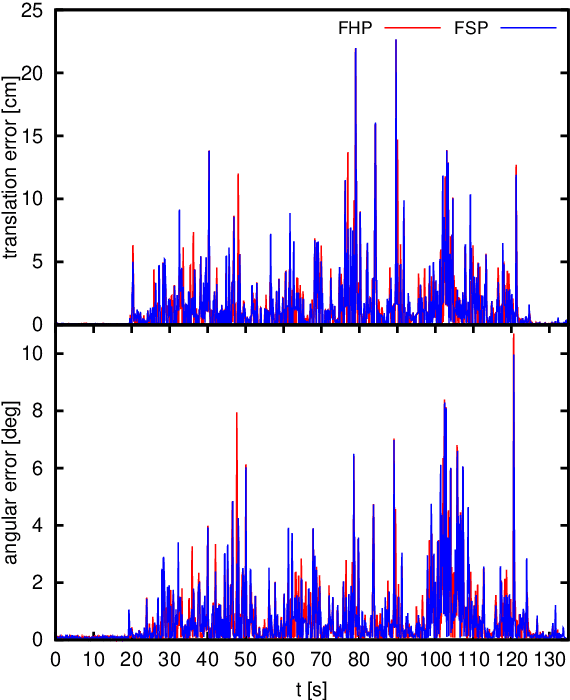
With the objective of improving the registration of LiDAR point clouds produced by kinematic scanning systems, we propose a novel trajectory adjustment procedure that leverages on the automated extraction of selected reliable 3D point--to--point correspondences between overlapping point clouds and their joint integration (adjustment) together with all raw inertial and GNSS observations. This is performed in a tightly coupled fashion using a Dynamic Network approach that results in an optimally compensated trajectory through modeling of errors at the sensor, rather than the trajectory, level. The 3D correspondences are formulated as static conditions within this network and the registered point cloud is generated with higher accuracy utilizing the corrected trajectory and possibly other parameters determined within the adjustment. We first describe the method for selecting correspondences and how they are inserted into the Dynamic Network as new observation models. We then describe the experiments conducted to evaluate the performance of the proposed framework in practical airborne laser scanning scenarios with low-cost MEMS inertial sensors. In the conducted experiments, the method proposed to establish 3D correspondences is effective in determining point--to--point matches across a wide range of geometries such as trees, buildings and cars. Our results demonstrate that the method improves the point cloud registration accuracy, that is otherwise strongly affected by errors in the determined platform attitude or position (in nominal and emulated GNSS outage conditions), and possibly determine unknown boresight angles using only a fraction of the total number of 3D correspondences that are established.