 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Gaussian Splatting aided Localization for Large and Complex Indoor-Environments
Feb 19, 2025The field of visual localization has been researched for several decades and has meanwhile found many practical applications. Despite the strong progress in this field, there are still challenging situations in which established methods fail. We present an approach to significantly improve the accuracy and reliability of established visual localization methods by adding rendered images. In detail, we first use a modern visual SLAM approach that provides a 3D Gaussian Splatting (3DGS) based map to create reference data. We demonstrate that enriching reference data with images rendered from 3DGS at randomly sampled poses significantly improves the performance of both geometry-based visual localization and Scene Coordinate Regression (SCR) methods. Through comprehensive evaluation in a large industrial environment, we analyze the performance impact of incorporating these additional rendered views.
HI-SLAM2: Geometry-Aware Gaussian SLAM for Fast Monocular Scene Reconstruction
Nov 27, 2024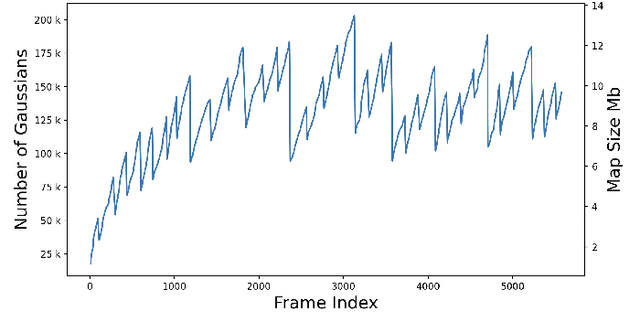
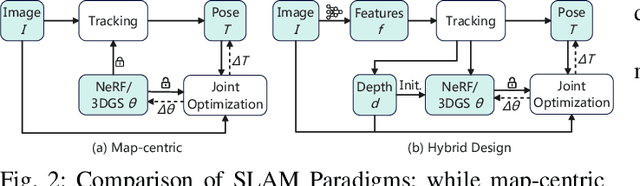
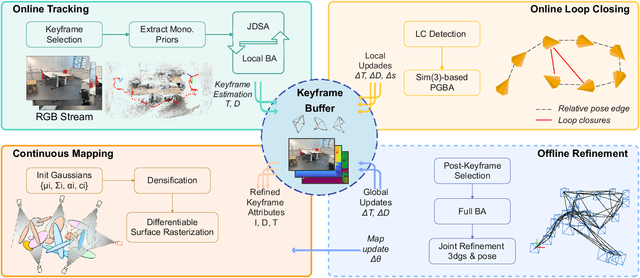
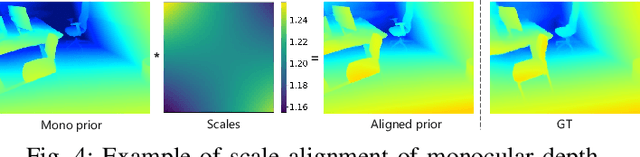
We present HI-SLAM2, a geometry-aware Gaussian SLAM system that achieves fast and accurate monocular scene reconstruction using only RGB input. Existing Neural SLAM or 3DGS-based SLAM methods often trade off between rendering quality and geometry accuracy, our research demonstrates that both can be achieved simultaneously with RGB input alone. The key idea of our approach is to enhance the ability for geometry estimation by combining easy-to-obtain monocular priors with learning-based dense SLAM, and then using 3D Gaussian splatting as our core map representation to efficiently model the scene. Upon loop closure, our method ensures on-the-fly global consistency through efficient pose graph bundle adjustment and instant map updates by explicitly deforming the 3D Gaussian units based on anchored keyframe updates. Furthermore, we introduce a grid-based scale alignment strategy to maintain improved scale consistency in prior depths for finer depth details. Through extensive experiments on Replica, ScanNet, and ScanNet++, we demonstrate significant improvements over existing Neural SLAM methods and even surpass RGB-D-based methods in both reconstruction and rendering quality. The project page and source code will be made available at https://hi-slam2.github.io/.
SLAM for Indoor Mapping of Wide Area Construction Environments
Apr 26, 2024



Simultaneous localization and mapping (SLAM), i.e., the reconstruction of the environment represented by a (3D) map and the concurrent pose estimation, has made astonishing progress. Meanwhile, large scale applications aiming at the data collection in complex environments like factory halls or construction sites are becoming feasible. However, in contrast to small scale scenarios with building interiors separated to single rooms, shop floors or construction areas require measures at larger distances in potentially texture less areas under difficult illumination. Pose estimation is further aggravated since no GNSS measures are available as it is usual for such indoor applications. In our work, we realize data collection in a large factory hall by a robot system equipped with four stereo cameras as well as a 3D laser scanner. We apply our state-of-the-art LiDAR and visual SLAM approaches and discuss the respective pros and cons of the different sensor types for trajectory estimation and dense map generation in such an environment. Additionally, dense and accurate depth maps are generated by 3D Gaussian splatting, which we plan to use in the context of our project aiming on the automatic construction and site monitoring.
DMSA -- Dense Multi Scan Adjustment for LiDAR Inertial Odometry and Global Optimization
Feb 29, 2024We propose a new method for fine registering multiple point clouds simultaneously. The approach is characterized by being dense, therefore point clouds are not reduced to pre-selected features in advance. Furthermore, the approach is robust against small overlaps and dynamic objects, since no direct correspondences are assumed between point clouds. Instead, all points are merged into a global point cloud, whose scattering is then iteratively reduced. This is achieved by dividing the global point cloud into uniform grid cells whose contents are subsequently modeled by normal distributions. We show that the proposed approach can be used in a sliding window continuous trajectory optimization combined with IMU measurements to obtain a highly accurate and robust LiDAR inertial odometry estimation. Furthermore, we show that the proposed approach is also suitable for large scale keyframe optimization to increase accuracy. We provide the source code and some experimental data on https://github.com/davidskdds/DMSA_LiDAR_SLAM.git.