 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCENE: Reasoning about Traffic Scenes using Heterogeneous Graph Neural Networks
Jan 09, 2023Understanding traffic scenes requires considering heterogeneous information about dynamic agents and the static infrastructure. In this work we propose SCENE, a methodology to encode diverse traffic scenes in heterogeneous graphs and to reason about these graphs using a heterogeneous Graph Neural Network encoder and task-specific decoders. The heterogeneous graphs, whose structures are defined by an ontology, consist of different nodes with type-specific node features and different relations with type-specific edge features. In order to exploit all the information given by these graphs, we propose to use cascaded layers of graph convolution. The result is an encoding of the scene. Task-specific decoders can be applied to predict desired attributes of the scene. Extensive evaluation on two diverse binary node classification tasks show the main strength of this methodology: despite being generic, it even manages to outperform task-specific baselines. The further application of our methodology to the task of node classification in various knowledge graphs shows its transferability to other domains.
* Thomas Monninger and Julian Schmidt are co-first authors. The order was determined alphabetically
MEAT: Maneuver Extraction from Agent Trajectories
Jun 10, 2022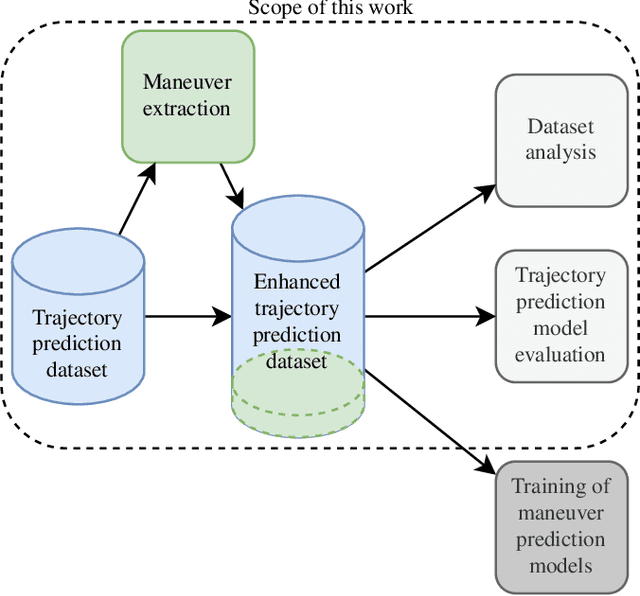
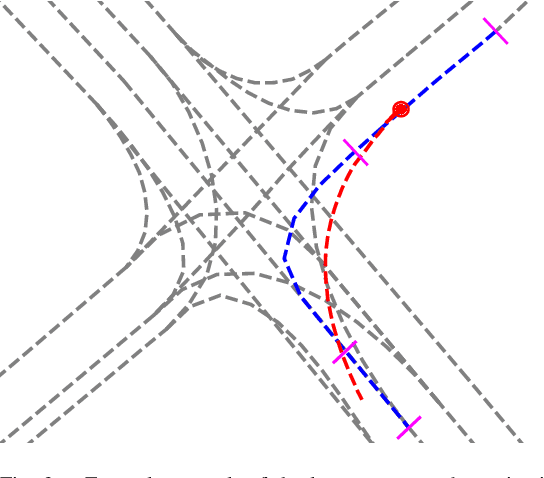
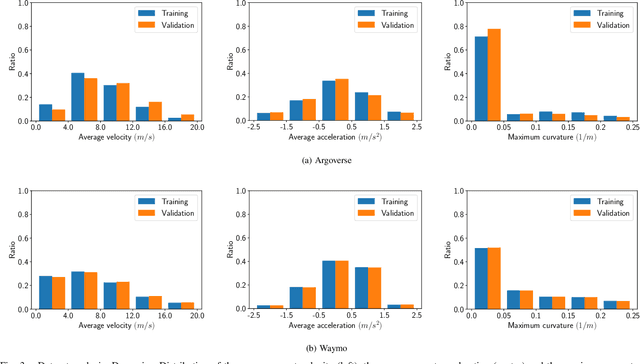
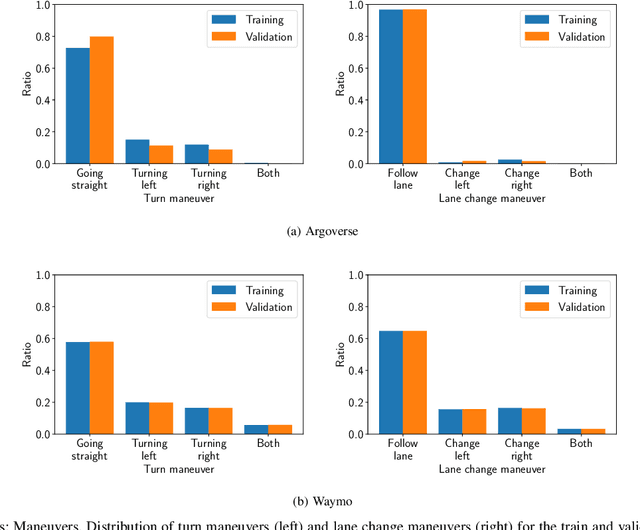
Advances in learning-based trajectory prediction are enabled by large-scale datasets. However, in-depth analysis of such datasets is limited. Moreover, the evaluation of prediction models is limited to metrics averaged over all samples in the dataset. We propose an automated methodology that allows to extract maneuvers (e.g., left turn, lane change) from agent trajectories in such datasets. The methodology considers information about the agent dynamics and information about the lane segments the agent traveled along. Although it is possible to use the resulting maneuvers for training classification networks, we exemplary use them for extensive trajectory dataset analysis and maneuver-specific evaluation of multiple state-of-the-art trajectory prediction models. Additionally, an analysis of the datasets and an evaluation of the prediction models based on the agent dynamics is provided.