 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTIPP: Space-time in situ postprocessing over the French Alps using proper scoring rules
Jan 06, 2026We propose Space-time in situ postprocessing (STIPP), a machine learning model that generates spatio-temporally consistent weather forecasts for a network of station locations. Gridded forecasts from classical numerical weather prediction or data-driven models often lack the necessary precision due to unresolved local effects. Typical statistical postprocessing methods correct these biases, but often degrade spatio-temporal correlation structures in doing so. Recent works based on generative modeling successfully improve spatial correlation structures but have to forecast every lead time independently. In contrast, STIPP makes joint spatio-temporal forecasts which have increased accuracy for surface temperature, wind, relative humidity and precipitation when compared to baseline methods. It makes hourly ensemble predictions given only a six-hourly deterministic forecast, blending the boundaries of postprocessing and temporal interpolation. By leveraging a multivariate proper scoring rule for training, STIPP contributes to ongoing work data-driven atmospheric models supervised only with distribution marginals.
Generating ensembles of spatially-coherent in-situ forecasts using flow matching
Apr 04, 2025We propose a machine-learning-based methodology for in-situ weather forecast postprocessing that is both spatially coherent and multivariate. Compared to previous work, our Flow MAtching Postprocessing (FMAP) better represents the correlation structures of the observations distribution, while also improving marginal performance at the stations. FMAP generates forecasts that are not bound to what is already modeled by the underlying gridded prediction and can infer new correlation structures from data. The resulting model can generate an arbitrary number of forecasts from a limited number of numerical simulations, allowing for low-cost forecasting systems. A single training is sufficient to perform postprocessing at multiple lead times, in contrast with other methods which use multiple trained networks at generation time. This work details our methodology, including a spatial attention transformer backbone trained within a flow matching generative modeling framework. FMAP shows promising performance in experiments on the EUPPBench dataset, forecasting surface temperature and wind gust values at station locations in western Europe up to five-day lead times.
CELLO-3D: Estimating the Covariance of ICP in the Real World
Oct 02, 2018

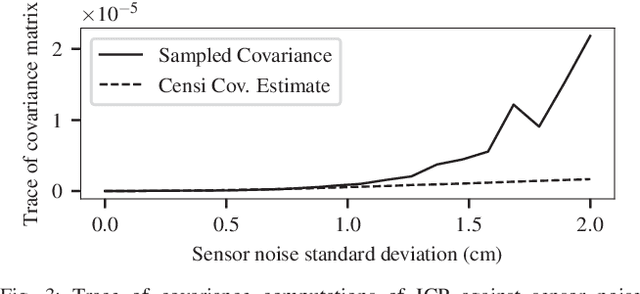
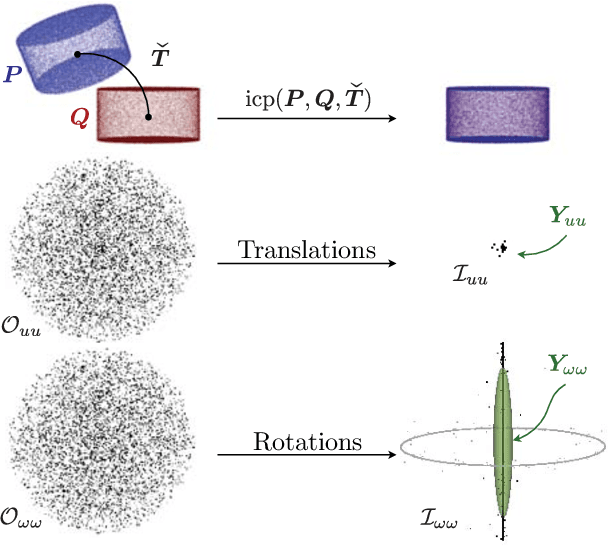
The fusion of Iterative Closest Point (ICP) reg- istrations in existing state estimation frameworks relies on an accurate estimation of their uncertainty. In this paper, we study the estimation of this uncertainty in the form of a covariance. First, we scrutinize the limitations of existing closed-form covariance estimation algorithms over 3D datasets. Then, we set out to estimate the covariance of ICP registrations through a data-driven approach, with over 5 100 000 registrations on 1020 pairs from real 3D point clouds. We assess our solution upon a wide spectrum of environments, ranging from structured to unstructured and indoor to outdoor. The capacity of our algorithm to predict covariances is accurately assessed, as well as the usefulness of these estimations for uncertainty estimation over trajectories. The proposed method estimates covariances better than existing closed-form solutions, and makes predictions that are consistent with observed trajectories.