 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrack Everything: Limiting Prior Knowledge in Online Multi-Object Recognition
Apr 21, 2017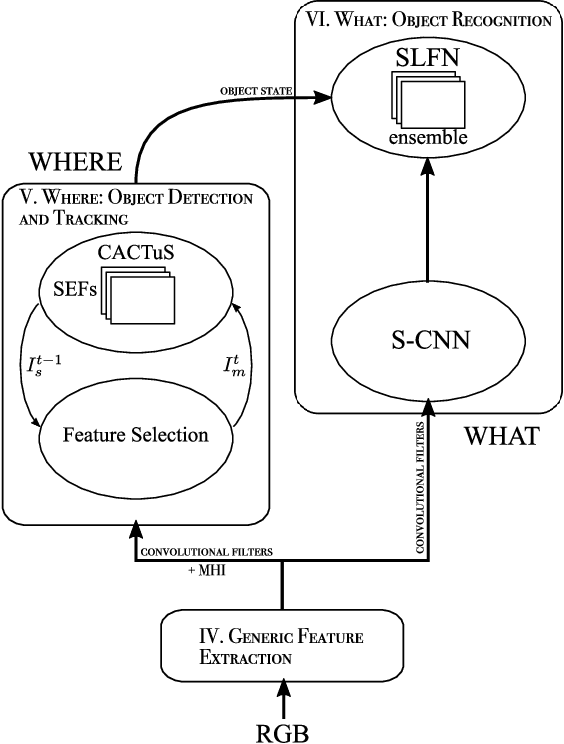
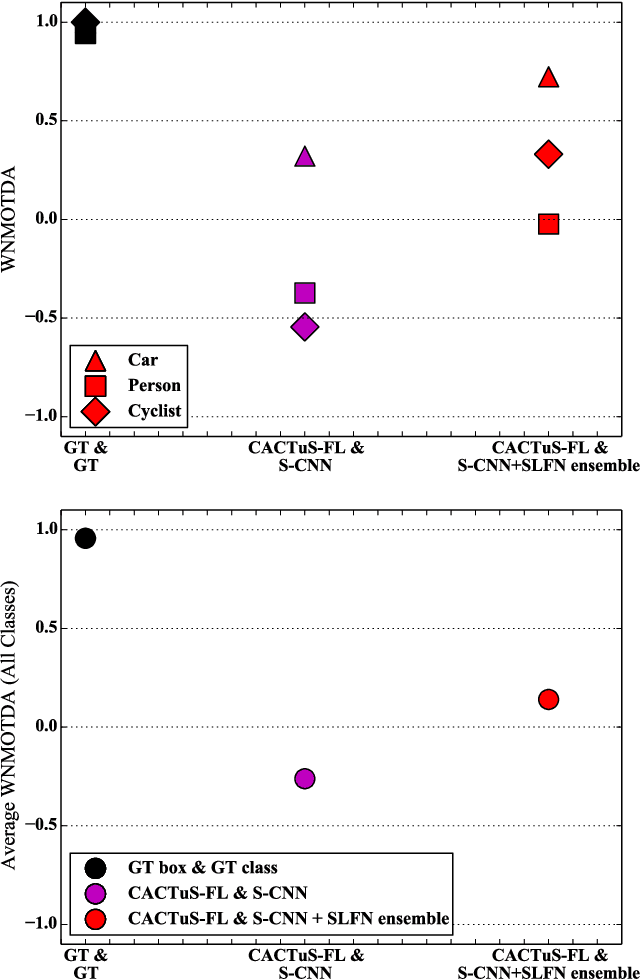
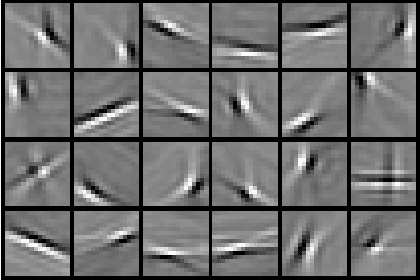
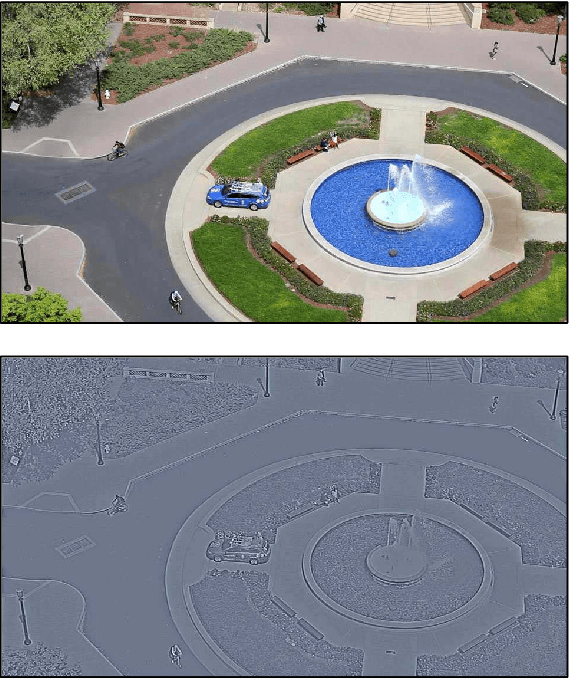
This paper addresses the problem of online tracking and classification of multiple objects in an image sequence. Our proposed solution is to first track all objects in the scene without relying on object-specific prior knowledge, which in other systems can take the form of hand-crafted features or user-based track initialization. We then classify the tracked objects with a fast-learning image classifier that is based on a shallow convolutional neural network architecture and demonstrate that object recognition improves when this is combined with object state information from the tracking algorithm. We argue that by transferring the use of prior knowledge from the detection and tracking stages to the classification stage we can design a robust, general purpose object recognition system with the ability to detect and track a variety of object types. We describe our biologically inspired implementation, which adaptively learns the shape and motion of tracked objects, and apply it to the Neovision2 Tower benchmark data set, which contains multiple object types. An experimental evaluation demonstrates that our approach is competitive with state-of-the-art video object recognition systems that do make use of object-specific prior knowledge in detection and tracking, while providing additional practical advantages by virtue of its generality.
A data set for evaluating the performance of multi-class multi-object video tracking
Apr 21, 2017One of the challenges in evaluating multi-object video detection, tracking and classification systems is having publically available data sets with which to compare different systems. However, the measures of performance for tracking and classification are different. Data sets that are suitable for evaluating tracking systems may not be appropriate for classification. Tracking video data sets typically only have ground truth track IDs, while classification video data sets only have ground truth class-label IDs. The former identifies the same object over multiple frames, while the latter identifies the type of object in individual frames. This paper describes an advancement of the ground truth meta-data for the DARPA Neovision2 Tower data set to allow both the evaluation of tracking and classification. The ground truth data sets presented in this paper contain unique object IDs across 5 different classes of object (Car, Bus, Truck, Person, Cyclist) for 24 videos of 871 image frames each. In addition to the object IDs and class labels, the ground truth data also contains the original bounding box coordinates together with new bounding boxes in instances where un-annotated objects were present. The unique IDs are maintained during occlusions between multiple objects or when objects re-enter the field of view. This will provide: a solid foundation for evaluating the performance of multi-object tracking of different types of objects, a straightforward comparison of tracking system performance using the standard Multi Object Tracking (MOT) framework, and classification performance using the Neovision2 metrics. These data have been hosted publically.