 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Family of Neural Networks Provably Resistant to Adversarial Attacks
Feb 01, 2019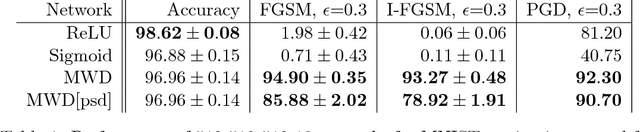
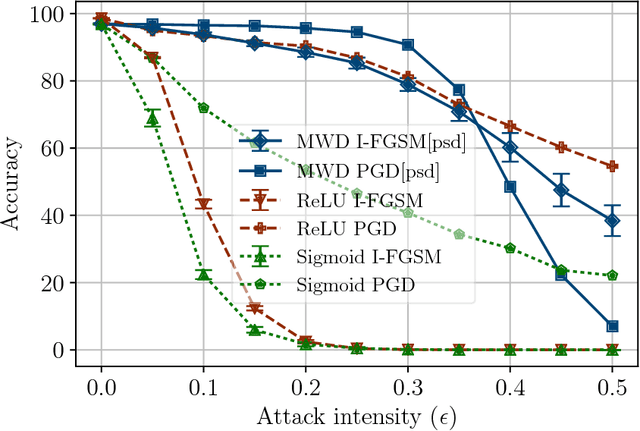
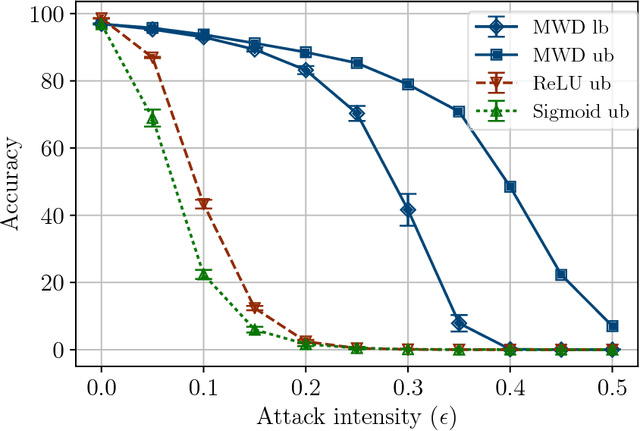
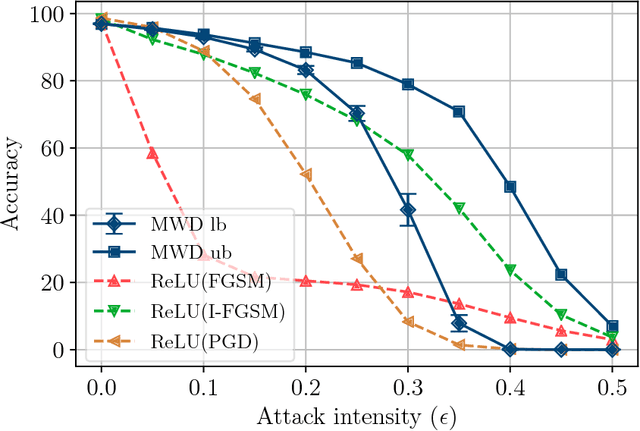
Adversarial attacks add perturbations to the input features with the intent of changing the classification produced by a machine learning system. Small perturbations can yield adversarial examples which are misclassified despite being virtually indistinguishable from the unperturbed input. Classifiers trained with standard neural network techniques are highly susceptible to adversarial examples, allowing an adversary to create misclassifications of their choice. We introduce a new type of network unit, called MWD (max of weighed distance) units that have a built-in resistant to adversarial attacks. These units are highly non-linear, and we develop the techniques needed to effectively train them. We show that simple interval techniques for propagating perturbation effects through the network enables the efficient computation of robustness (i.e., accuracy guarantees) for MWD networks under any perturbations, including adversarial attacks. MWD networks are significantly more robust to input perturbations than ReLU networks. On permutation invariant MNIST, when test examples can be perturbed by 20% of the input range, MWD networks provably retain accuracy above 83%, while the accuracy of ReLU networks drops below 5%. The provable accuracy of MWD networks is superior even to the observed accuracy of ReLU networks trained with the help of adversarial examples. In the absence of adversarial attacks, MWD networks match the performance of sigmoid networks, and have accuracy only slightly below that of ReLU networks.
Boosting in Location Space
Sep 04, 2013

The goal of object detection is to find objects in an image. An object detector accepts an image and produces a list of locations as $(x,y)$ pairs. Here we introduce a new concept: {\bf location-based boosting}. Location-based boosting differs from previous boosting algorithms because it optimizes a new spatial loss function to combine object detectors, each of which may have marginal performance, into a single, more accurate object detector. A structured representation of object locations as a list of $(x,y)$ pairs is a more natural domain for object detection than the spatially unstructured representation produced by classifiers. Furthermore, this formulation allows us to take advantage of the intuition that large areas of the background are uninteresting and it is not worth expending computational effort on them. This results in a more scalable algorithm because it does not need to take measures to prevent the background data from swamping the foreground data such as subsampling or applying an ad-hoc weighting to the pixels. We first present the theory of location-based boosting, and then motivate it with empirical results on a challenging data set.
Learning Object Location Predictors with Boosting and Grammar-Guided Feature Extraction
Jul 24, 2009
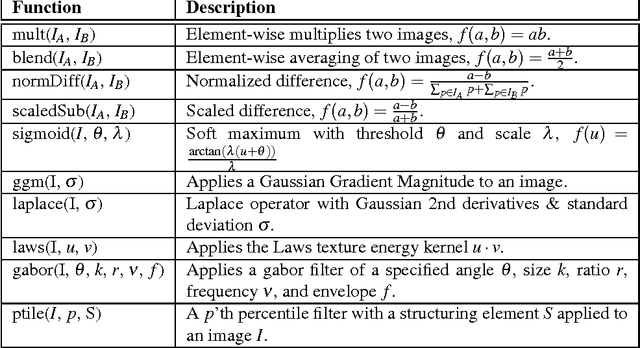
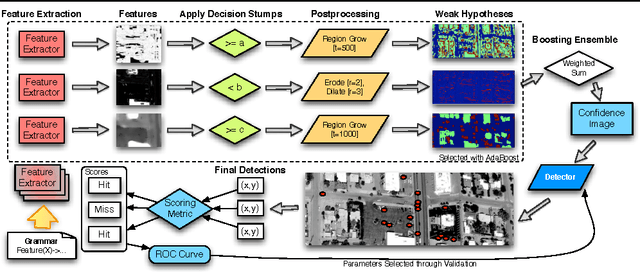
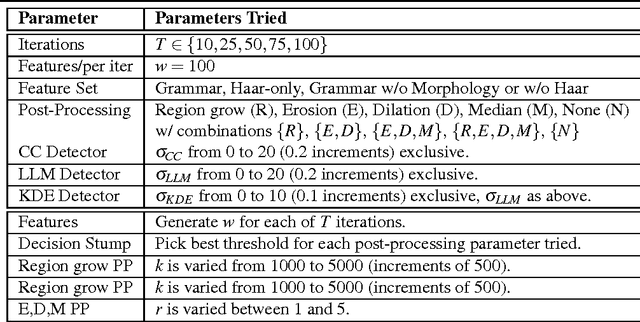
We present BEAMER: a new spatially exploitative approach to learning object detectors which shows excellent results when applied to the task of detecting objects in greyscale aerial imagery in the presence of ambiguous and noisy data. There are four main contributions used to produce these results. First, we introduce a grammar-guided feature extraction system, enabling the exploration of a richer feature space while constraining the features to a useful subset. This is specified with a rule-based generative grammar crafted by a human expert. Second, we learn a classifier on this data using a newly proposed variant of AdaBoost which takes into account the spatially correlated nature of the data. Third, we perform another round of training to optimize the method of converting the pixel classifications generated by boosting into a high quality set of (x, y) locations. Lastly, we carefully define three common problems in object detection and define two evaluation criteria that are tightly matched to these problems. Major strengths of this approach are: (1) a way of randomly searching a broad feature space, (2) its performance when evaluated on well-matched evaluation criteria, and (3) its use of the location prediction domain to learn object detectors as well as to generate detections that perform well on several tasks: object counting, tracking, and target detection. We demonstrate the efficacy of BEAMER with a comprehensive experimental evaluation on a challenging data set.