 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAud-Sur: An Audio Analyzer Assistant for Audio Surveillance Applications
Mar 31, 2025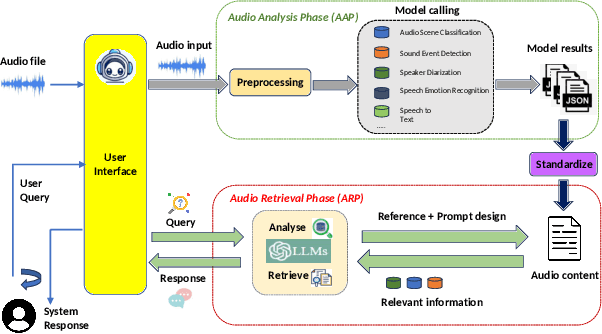
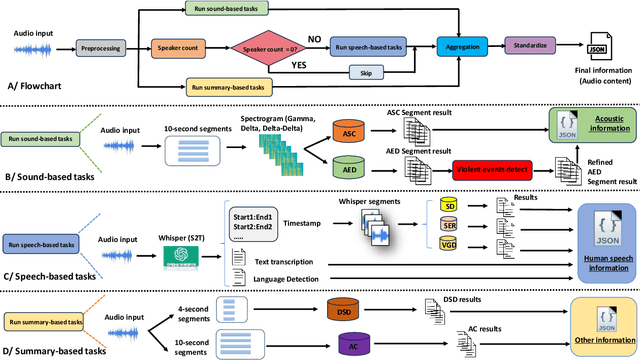
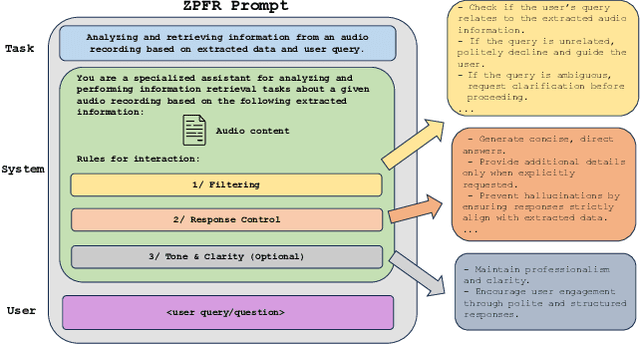
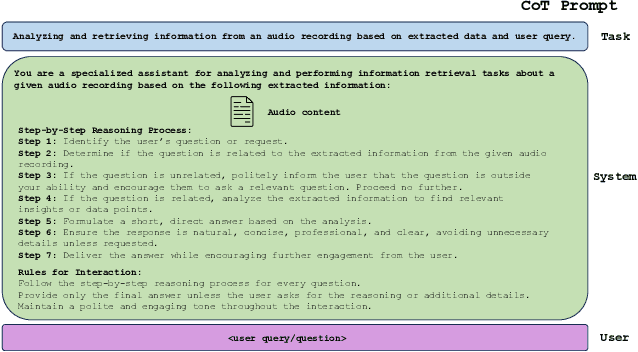
In this paper, we present an audio analyzer assistant tool designed for a wide range of audio-based surveillance applications (This work is a part of our DEFAME FAKES and EUCINF projects). The proposed tool, refered to as Aud-Sur, comprises two main phases Audio Analysis and Audio Retrieval, respectively. In the first phase, multiple open-source audio models are leveraged to extract information from input audio recording uploaded by a user. In the second phase, users interact with the Aud-Sur tool via a natural question-and-answer manner, powered by a large language model (LLM), to retrieve the information extracted from the processed audio file. The Aud-Sur tool was deployed using Docker on a microservices-based architecture design. By leveraging open-source audio models for information extraction, LLM for audio information retrieval, and a microservices-based deployment approach, the proposed Aud-Sur tool offers a highly extensible and adaptable framework that can integrate more audio tasks, and be widely shared within the audio community for further development.
DF2023: The Digital Forensics 2023 Dataset for Image Forgery Detection
Mar 28, 2025



The deliberate manipulation of public opinion, especially through altered images, which are frequently disseminated through online social networks, poses a significant danger to society. To fight this issue on a technical level we support the research community by releasing the Digital Forensics 2023 (DF2023) training and validation dataset, comprising one million images from four major forgery categories: splicing, copy-move, enhancement and removal. This dataset enables an objective comparison of network architectures and can significantly reduce the time and effort of researchers preparing datasets.
* Published at the 25th Irish Machine Vision and Image Processing Conference (IMVIP) --- Proceedings: https://iprcs.github.io/pdf/IMVIP2023_Proceeding.pdf --- Dataset download: https://zenodo.org/records/7326540/files/DF2023_train.zip https://zenodo.org/records/7326540/files/DF2023_val.zip Kaggle: https://www.kaggle.com/datasets/davidfischinger/df2023-digital-forensics-2023-dataset/data
DF-Net: The Digital Forensics Network for Image Forgery Detection
Mar 28, 2025The orchestrated manipulation of public opinion, particularly through manipulated images, often spread via online social networks (OSN), has become a serious threat to society. In this paper we introduce the Digital Forensics Net (DF-Net), a deep neural network for pixel-wise image forgery detection. The released model outperforms several state-of-the-art methods on four established benchmark datasets. Most notably, DF-Net's detection is robust against lossy image operations (e.g resizing, compression) as they are automatically performed by social networks.
* Published in 2023 at the 25th Irish Machine Vision and Image Processing Conference (IMVIP), https://iprcs.github.io/pdf/IMVIP2023_Proceeding.pdf
EasyLabel: A Semi-Automatic Pixel-wise Object Annotation Tool for Creating Robotic RGB-D Datasets
Mar 01, 2019

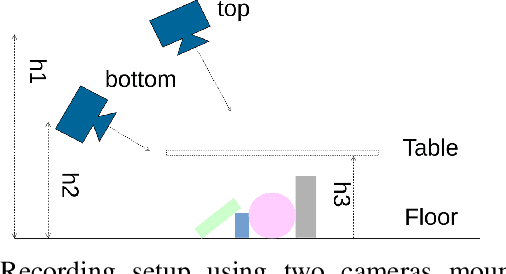

Developing robot perception systems for recognizing objects in the real-world requires computer vision algorithms to be carefully scrutinized with respect to the expected operating domain. This demands large quantities of ground truth data to rigorously evaluate the performance of algorithms. This paper presents the EasyLabel tool for easily acquiring high quality ground truth annotation of objects at the pixel-level in densely cluttered scenes. In a semi-automatic process, complex scenes are incrementally built and EasyLabel exploits depth change to extract precise object masks at each step. We use this tool to generate the Object Cluttered Indoor Dataset (OCID) that captures diverse settings of objects, background, context, sensor to scene distance, viewpoint angle and lighting conditions. OCID is used to perform a systematic comparison of existing object segmentation methods. The baseline comparison supports the need for pixel- and object-wise annotation to progress robot vision towards realistic applications. This insight reveals the usefulness of EasyLabel and OCID to better understand the challenges that robots face in the real-world. Copyright 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.