 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative Navigation and Dynamic Target Tracking for Autonomous Underwater Proximity Operations
Aug 23, 2025Estimating a target's 6-DoF motion in underwater proximity operations is difficult because the chaser lacks target-side proprioception and the available relative observations are sparse, noisy, and often partial (e.g., Ultra-Short Baseline (USBL) positions). Without a motion prior, factor-graph maximum a posteriori estimation is underconstrained: consecutive target states are weakly linked and orientation can drift. We propose a generalized constant-twist motion prior defined on the tangent space of Lie groups that enforces temporally consistent trajectories across all degrees of freedom; in SE(3) it couples translation and rotation in the body frame. We present a ternary factor and derive its closed-form Jacobians based on standard Lie group operations, enabling drop-in use for trajectories on arbitrary Lie groups. We evaluate two deployment modes: (A) an SE(3)-only representation that regularizes orientation even when only position is measured, and (B) a mode with boundary factors that switches the target representation between SE(3) and 3D position while applying the same generalized constant-twist prior across representation changes. Validation on a real-world dynamic docking scenario dataset shows consistent ego-target trajectory estimation through USBL-only and optical relative measurement segments with an improved relative tracking accuracy compared to the noisy measurements to the target. Because the construction relies on standard Lie group primitives, it is portable across state manifolds and sensing modalities.
Probabilistic Data Association via Mixture Models for Robust Semantic SLAM
Sep 29, 2019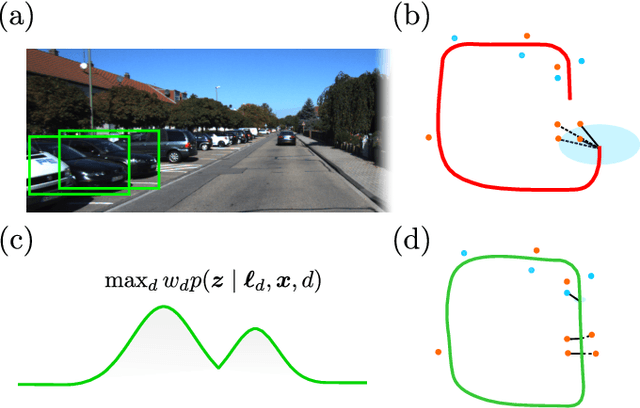
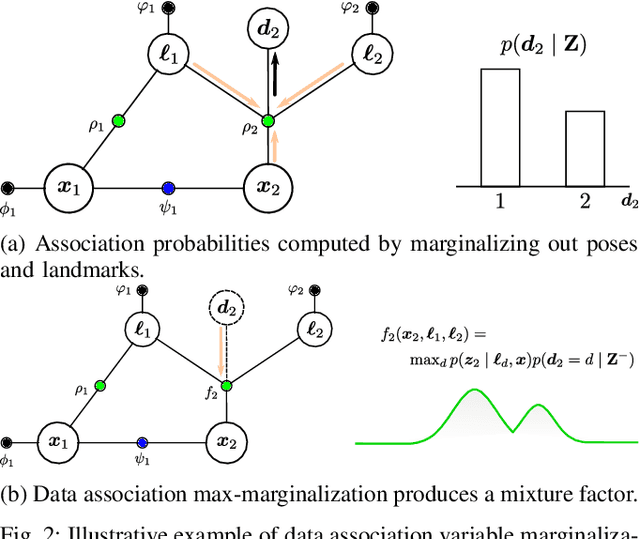
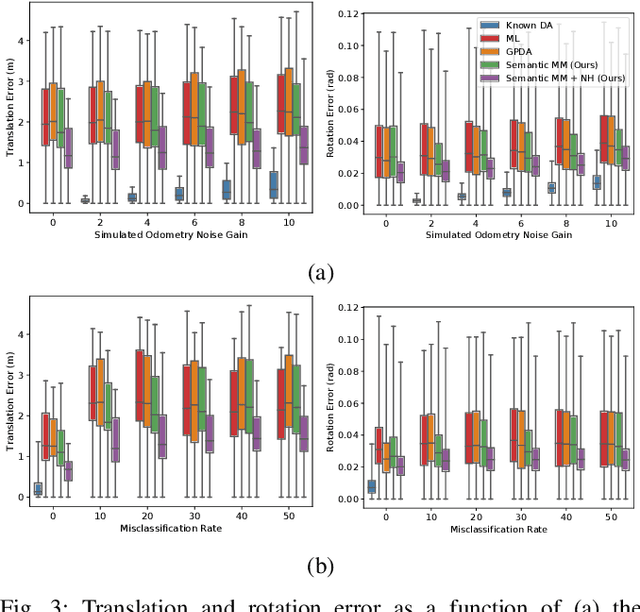
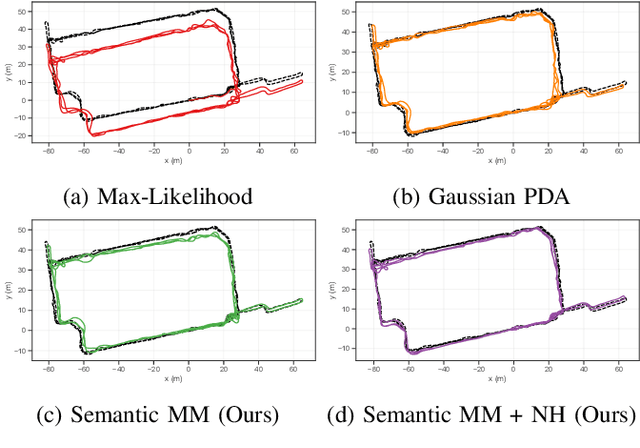
Modern robotic systems sense the environment geometrically, through sensors like cameras, lidar, and sonar, as well as semantically, often through visual models learned from data, such as object detectors. We aim to develop robots that can use all of these sources of information for reliable navigation, but each is corrupted by noise. Rather than assume that object detection will eventually achieve near perfect performance across the lifetime of a robot, in this work we represent and cope with the semantic and geometric uncertainty inherent in methods like object detection. Specifically, we model data association ambiguity, which is typically non-Gaussian, in a way that is amenable to solution within the common nonlinear Gaussian formulation of simultaneous localization and mapping (SLAM). We do so by eliminating data association variables from the inference process through max-marginalization, preserving standard Gaussian posterior assumptions. The result is a max-mixture-type model that accounts for multiple data association hypotheses as well as incorrect loop closures. We provide experimental results on indoor and outdoor semantic navigation tasks with noisy odometry and object detection and find that the ability of the proposed approach to represent multiple hypotheses, including the "null" hypothesis, gives substantial robustness advantages in comparison to alternative semantic SLAM approaches.