 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLane Departure Prediction Based on Closed-Loop Vehicle Dynamics
Jan 24, 2022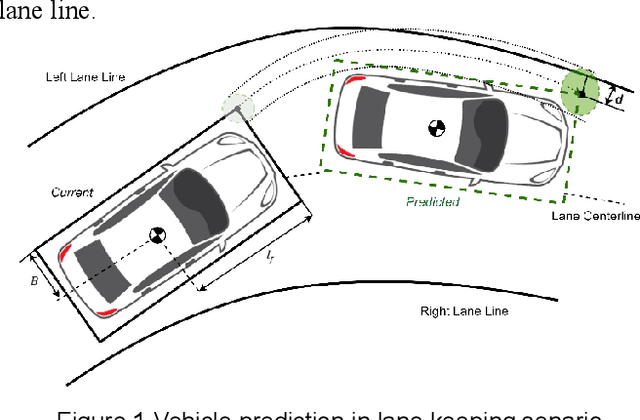
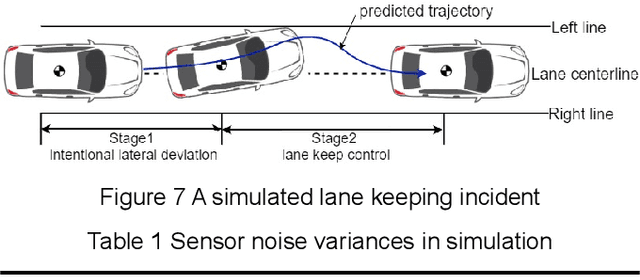
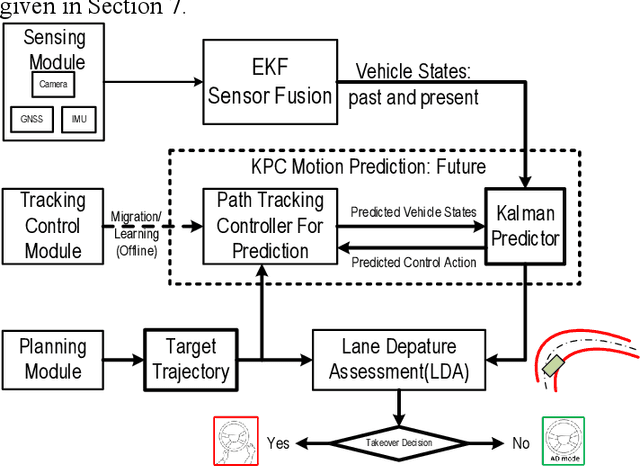
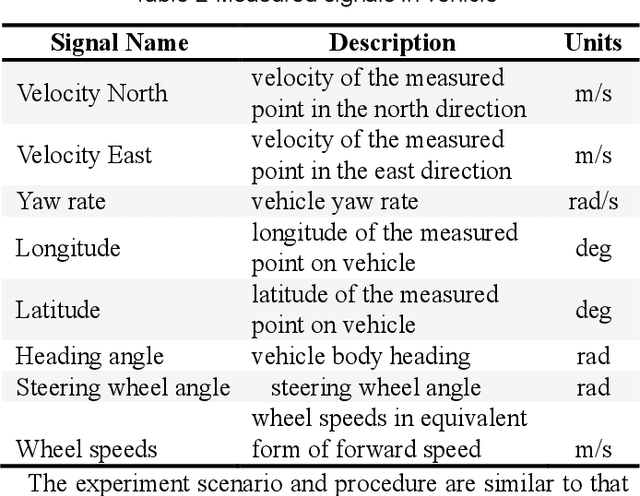
An automated driving system should have the ability to supervise its own performance and to request human driver to take over when necessary. In the lane keeping scenario, the prediction of vehicle future trajectory is the key to realize safe and trustworthy driving automation. Previous studies on vehicle trajectory prediction mainly fall into two categories, i.e. physics-based and manoeuvre-based methods. Using a physics-based methodology, this paper proposes a lane departure prediction algorithm based on closed-loop vehicle dynamics model. We use extended Kalman filter to estimate the current vehicle states based on sensing module outputs. Then a Kalman Predictor with actual lane keeping control law is used to predict steering actions and vehicle states in the future. A lane departure assessment module evaluates the probabilistic distribution of vehicle corner positions and decides whether to initiate a human takeover request. The prediction algorithm is capable to describe the stochastic characteristics of future vehicle pose, which is preliminarily proved in simulated tests. Finally, the on-road tests at speeds of 15 to 50 km/h further show that the pro-posed method can accurately predict vehicle future trajectory. It may work as a promising solution to lane departure risk assessment for automated lane keeping functions.
Human-like Driving Decision at Unsignalized Intersections Based on Game Theory
Jan 10, 2022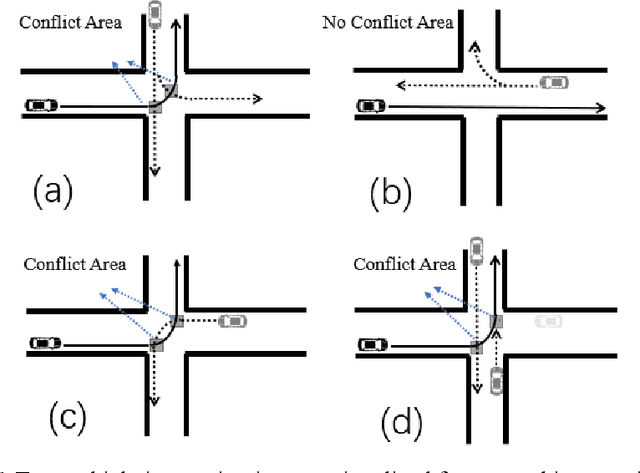
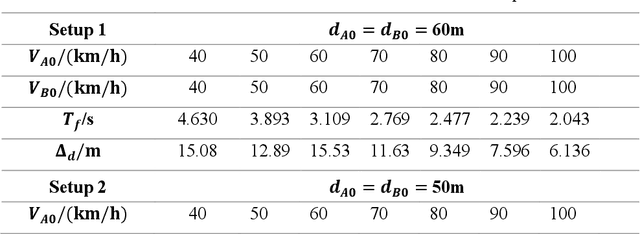
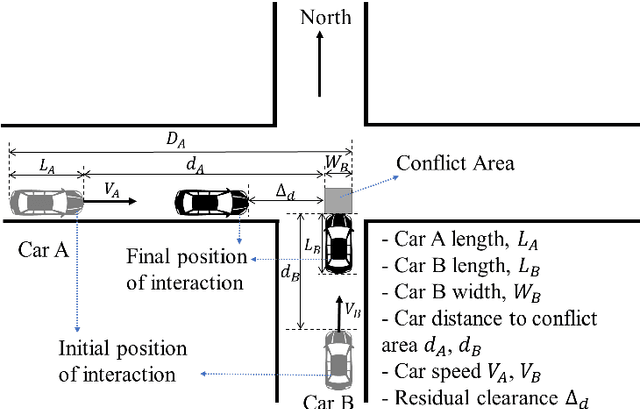
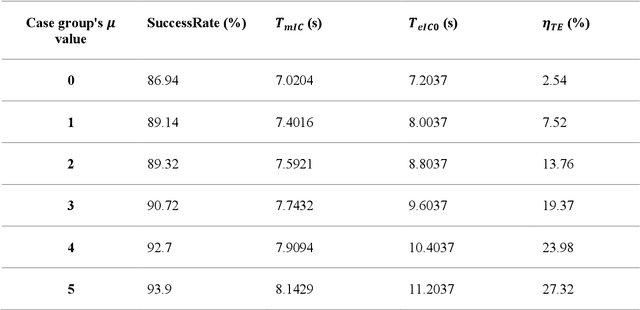
Unsignalized intersection driving is challenging for automated vehicles. For safe and efficient performances, the diverse and dynamic behaviors of interacting vehicles should be considered. Based on a game-theoretic framework, a human-like payoff design methodology is proposed for the automated decision at unsignalized intersections. Prospect Theory is introduced to map the objective collision risk to the subjective driver payoffs, and the driving style can be quantified as a tradeoff between safety and speed. To account for the dynamics of interaction, a probabilistic model is further introduced to describe the acceleration tendency of drivers. Simulation results show that the proposed decision algorithm can describe the dynamic process of two-vehicle interaction in limit cases. Statistics of uniformly-sampled cases simulation indicate that the success rate of safe interaction reaches 98%, while the speed efficiency can also be guaranteed. The proposed approach is further applied and validated in four-vehicle interaction scenarios at a four-arm intersection.
Personalized Lane Change Decision Algorithm Using Deep Reinforcement Learning Approach
Dec 17, 2021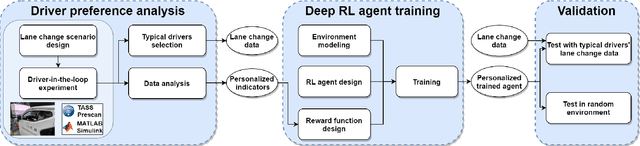
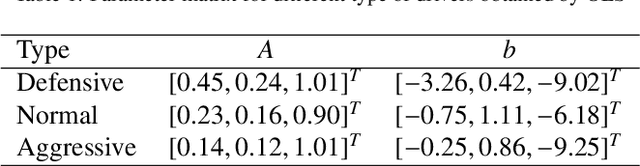

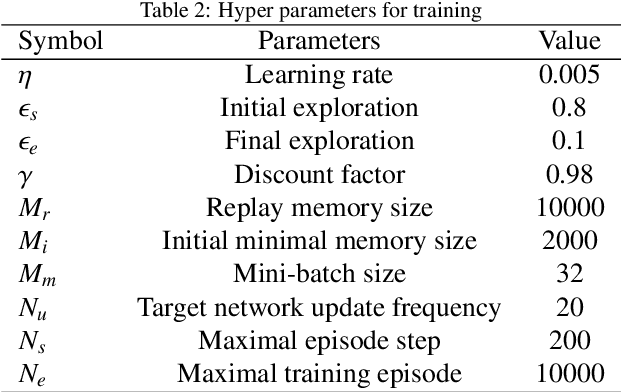
To develop driving automation technologies for human, a human-centered methodology should be adopted for ensured safety and satisfactory user experience. Automated lane change decision in dense highway traffic is challenging, especially when considering the personalized preferences of different drivers. To fulfill human driver centered decision algorithm development, we carry out driver-in-the-loop experiments on a 6-Degree-of-Freedom driving simulator. Based on the analysis of the lane change data by drivers of three specific styles,personalization indicators are selected to describe the driver preferences in lane change decision. Then a deep reinforcement learning (RL) approach is applied to design human-like agents for automated lane change decision, with refined reward and loss functions to capture the driver preferences.The trained RL agents and benchmark agents are tested in a two-lane highway driving scenario, and by comparing the agents with the specific drivers at the same initial states of lane change, the statistics show that the proposed algorithm can guarantee higher consistency of lane change decision preferences. The driver personalization indicators and the proposed RL-based lane change decision algorithm are promising to contribute in automated lane change system developing.
Personalized Highway Pilot Assist Considering Leading Vehicle's Lateral Behaviours
Dec 11, 2021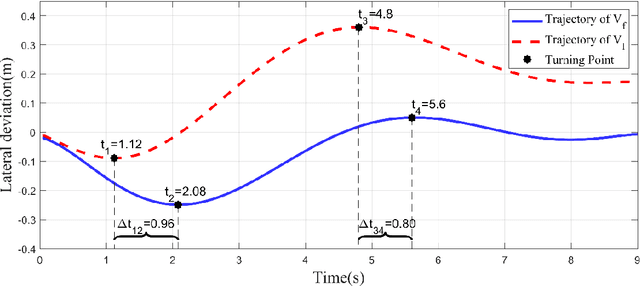
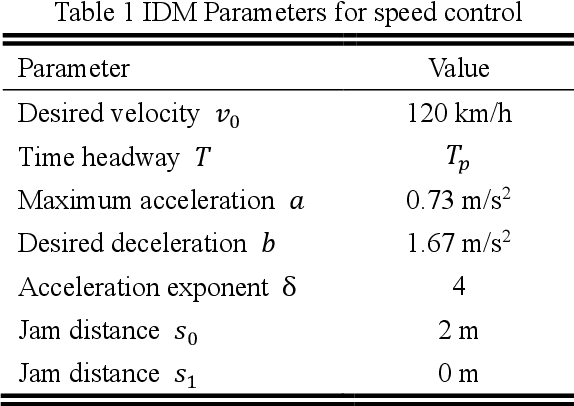
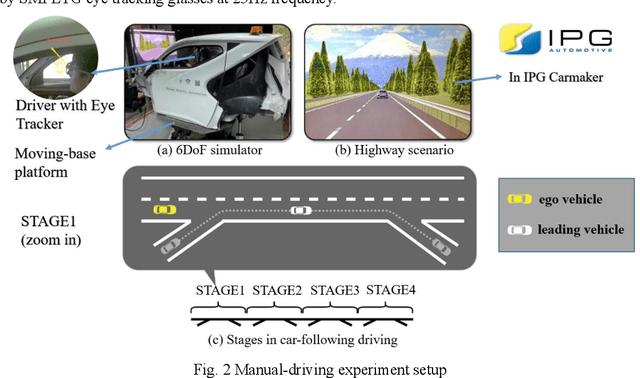
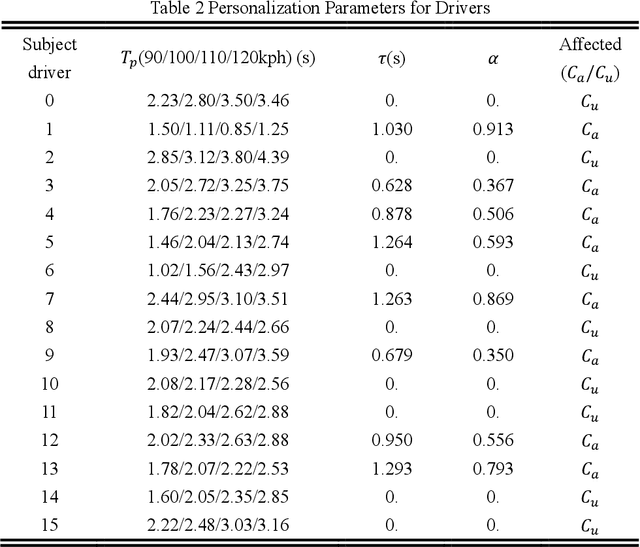
Highway pilot assist has become the front line of competition in advanced driver assistance systems. The increasing requirements on safety and user acceptance are calling for personalization in the development process of such systems. Inspired by a finding on drivers' car-following preferences on lateral direction, a personalized highway pilot assist algorithm is proposed, which consists of an Intelligent Driver Model (IDM) based speed control model and a novel lane-keeping model considering the leading vehicle's lateral movement. A simulated driving experiment is conducted to analyse driver gaze and lane-keeping Behaviours in free-driving and following driving scenario. Drivers are clustered into two driving style groups referring to their driving Behaviours affected by the leading vehicle, and then the personalization parameters for every specific subject driver are optimized. The proposed algorithm is validated through driver-in-the-loop experiment based on a moving-base simulator. Results show that, compared with the un-personalized algorithms, the personalized highway pilot algorithm can significantly reduce the mental workload and improve user acceptance of the assist functions.