 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-like Driving Decision at Unsignalized Intersections Based on Game Theory
Paper and Code
Jan 10, 2022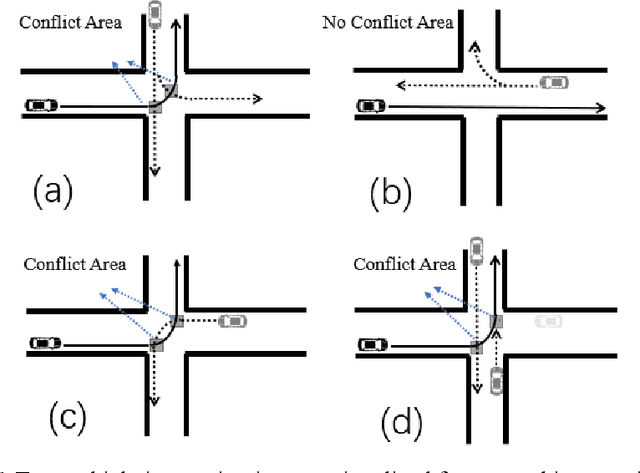
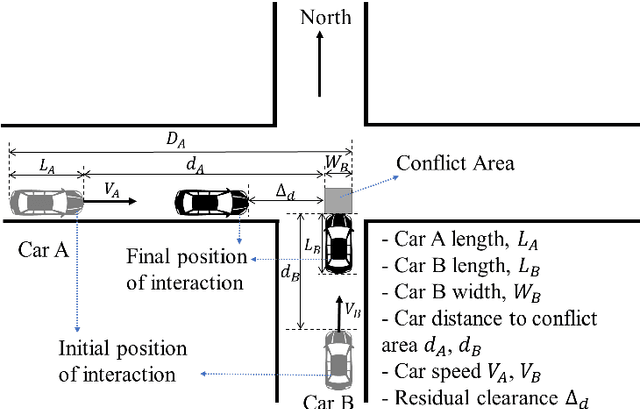
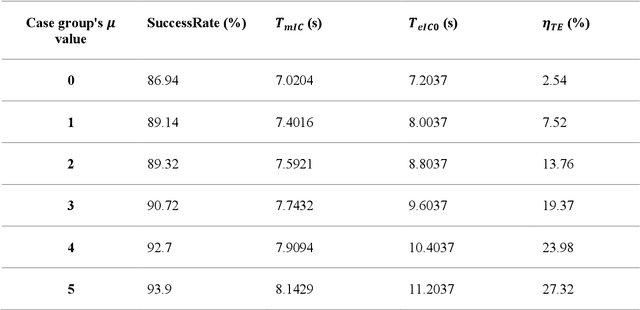
Unsignalized intersection driving is challenging for automated vehicles. For safe and efficient performances, the diverse and dynamic behaviors of interacting vehicles should be considered. Based on a game-theoretic framework, a human-like payoff design methodology is proposed for the automated decision at unsignalized intersections. Prospect Theory is introduced to map the objective collision risk to the subjective driver payoffs, and the driving style can be quantified as a tradeoff between safety and speed. To account for the dynamics of interaction, a probabilistic model is further introduced to describe the acceleration tendency of drivers. Simulation results show that the proposed decision algorithm can describe the dynamic process of two-vehicle interaction in limit cases. Statistics of uniformly-sampled cases simulation indicate that the success rate of safe interaction reaches 98%, while the speed efficiency can also be guaranteed. The proposed approach is further applied and validated in four-vehicle interaction scenarios at a four-arm intersection.