 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximation of the Basset force in the Maxey-Riley-Gatignol equations via universal differential equations
Apr 09, 2026The Maxey-Riley-Gatignol equations (MaRGE) model the motion of spherical inertial particles in a fluid. They contain the Basset force, an integral term which models history effects due to the formation of wakes and boundary layer effects. This causes the force that acts on a particle to depend on its past trajectory and complicates the numerical solution of MaRGE. Therefore, the Basset force is often neglected, despite substantial evidence that it has both quantitative and qualitative impact on the movement patterns of modelled particles. Using the concept of universal differential equations, we propose an approximation of the history term via neural networks which approximates MaRGE by a system of ordinary differential equations that can be solved with standard numerical solvers like Runge-Kutta methods.
Dynamic Deep Learning Based Super-Resolution For The Shallow Water Equations
Apr 09, 2024Using the nonlinear shallow water equations as benchmark, we demonstrate that a simulation with the ICON-O ocean model with a 20km resolution that is frequently corrected by a U-net-type neural network can achieve discretization errors of a simulation with 10km resolution. The network, originally developed for image-based super-resolution in post-processing, is trained to compute the difference between solutions on both meshes and is used to correct the coarse mesh every 12h. Our setup is the Galewsky test case, modeling transition of a barotropic instability into turbulent flow. We show that the ML-corrected coarse resolution run correctly maintains a balance flow and captures the transition to turbulence in line with the higher resolution simulation. After 8 day of simulation, the $L_2$-error of the corrected run is similar to a simulation run on the finer mesh. While mass is conserved in the corrected runs, we observe some spurious generation of kinetic energy.
Parareal with a Learned Coarse Model for Robotic Manipulation
Dec 12, 2019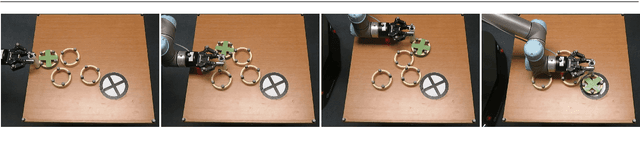


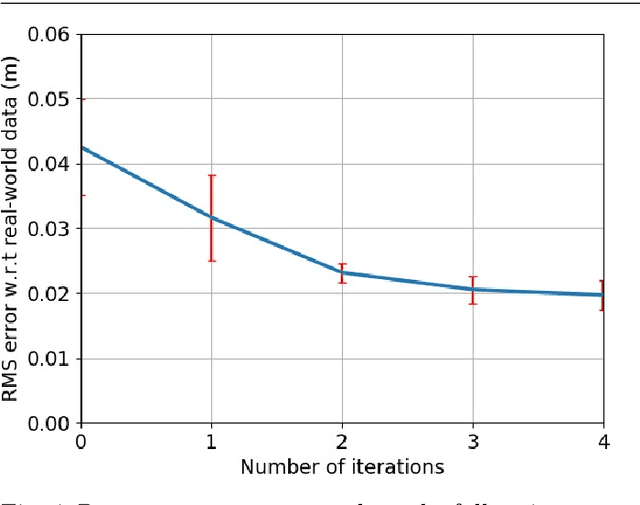
A key component of many robotics model-based planning and control algorithms is physics predictions, that is, forecasting a sequence of states given an initial state and a sequence of controls. This process is slow and a major computational bottleneck for robotics planning algorithms. Parallel-in-time integration methods can help to leverage parallel computing to accelerate physics predictions and thus planning. The Parareal algorithm iterates between a coarse serial integrator and a fine parallel integrator. A key challenge is to devise a coarse level model that is computationally cheap but accurate enough for Parareal to converge quickly. Here, we investigate the use of a deep neural network physics model as a coarse model for Parareal in the context of robotic manipulation. In simulated experiments using the physics engine Mujoco as fine propagator we show that the learned coarse model leads to faster Parareal convergence than a coarse physics-based model. We further show that the learned coarse model allows to apply Parareal to scenarios with multiple objects, where the physics-based coarse model is not applicable. Finally, We conduct experiments on a real robot and show that Parareal predictions are close to real-world physics predictions for robotic pushing of multiple objects. Some real robot manipulation plans using Parareal can be found at https://www.youtube.com/watch?v=wCh2o1rf-gA .
Combining Coarse and Fine Physics for Manipulation using Parallel-in-Time Integration
Mar 20, 2019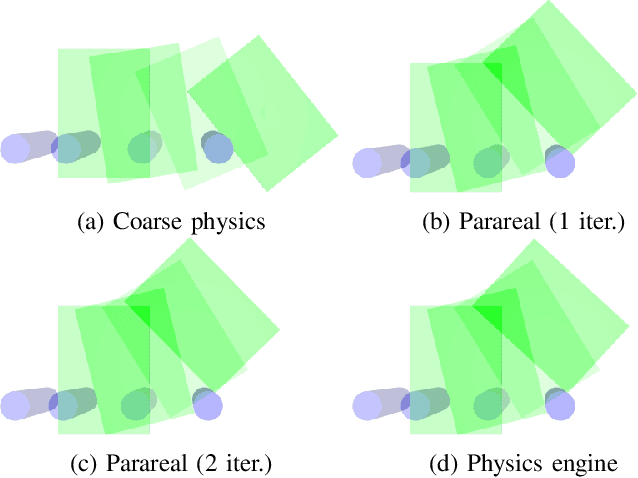
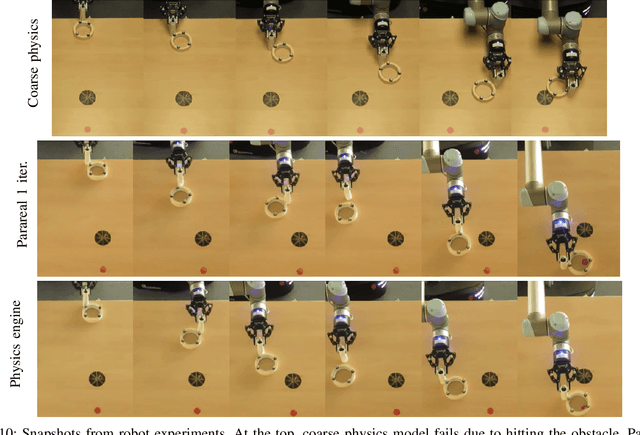
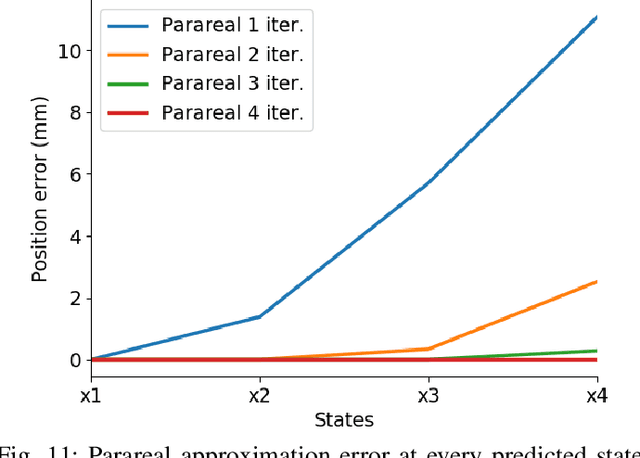
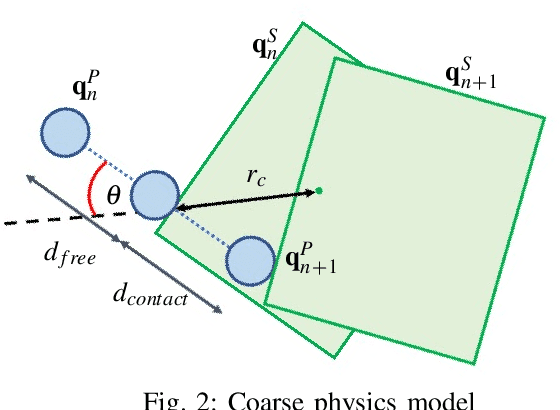
We present a method for fast and accurate physics-based predictions during non-prehensile manipulation planning and control. Given an initial state and a sequence of controls, the problem of predicting the resulting sequence of states is a key component of a variety of model-based planning and control algorithms. We propose combining a coarse (i.e. computationally cheap but not very accurate) predictive physics model, with a fine (i.e. computationally expensive but accurate) predictive physics model, to generate a hybrid model that is at the required speed and accuracy for a given manipulation task. Our approach is based on the Parareal algorithm, a parallel-in-time integration method used for computing numerical solutions for general systems of ordinary differential equations. We use Parareal to combine a coarse pushing model with an off-the-shelf physics engine to deliver physics-based predictions that are as accurate as the physics engine but runs in substantially less wall-clock time, thanks to Parareal being amenable to parallelization. We use these physics-based predictions in a model-predictive-control framework based on trajectory optimization, to plan pushing actions that avoid an obstacle and reach a goal location. We show that by combining the two physics models, we can achieve the same success rates as the planner that uses the off-the-shelf physics engine directly, but significantly faster. We present experiments in simulation and on a real robotic setup.