 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorner Cases for Visual Perception in Automated Driving: Some Guidance on Detection Approaches
Feb 11, 2021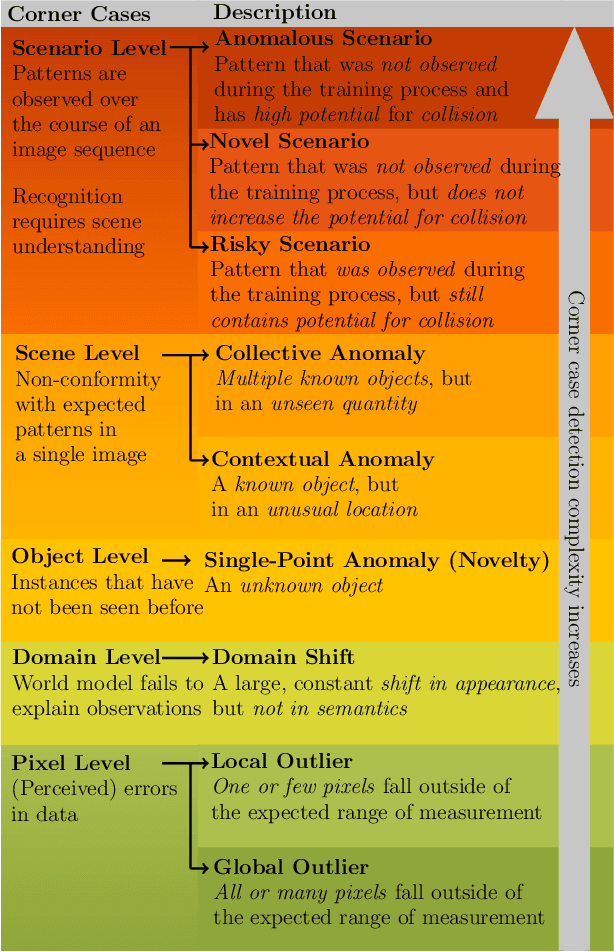


Automated driving has become a major topic of interest not only in the active research community but also in mainstream media reports. Visual perception of such intelligent vehicles has experienced large progress in the last decade thanks to advances in deep learning techniques but some challenges still remain. One such challenge is the detection of corner cases. They are unexpected and unknown situations that occur while driving. Conventional visual perception methods are often not able to detect them because corner cases have not been witnessed during training. Hence, their detection is highly safety-critical, and detection methods can be applied to vast amounts of collected data to select suitable training data. A reliable detection of corner cases will not only further automate the data selection procedure and increase safety in autonomous driving but can thereby also affect the public acceptance of the new technology in a positive manner. In this work, we continue a previous systematization of corner cases on different levels by an extended set of examples for each level. Moreover, we group detection approaches into different categories and link them with the corner case levels. Hence, we give directions to showcase specific corner cases and basic guidelines on how to technically detect them.
Towards Corner Case Detection for Autonomous Driving
Feb 26, 2019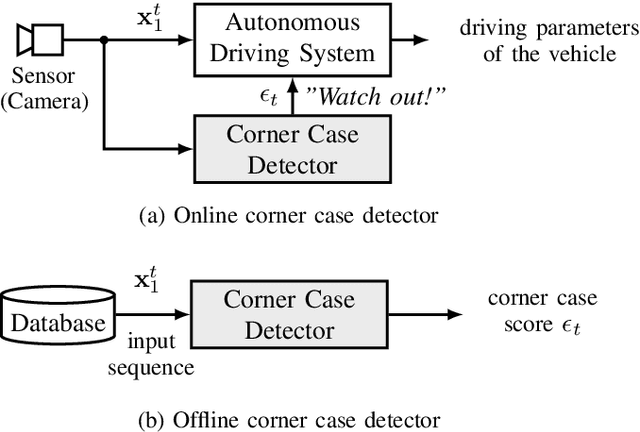

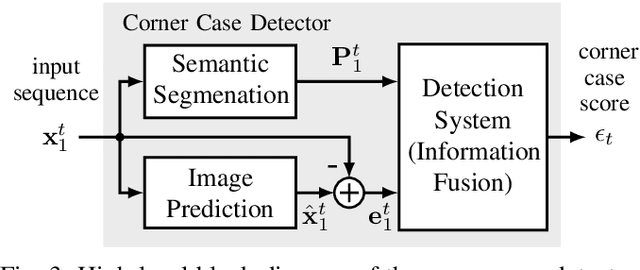
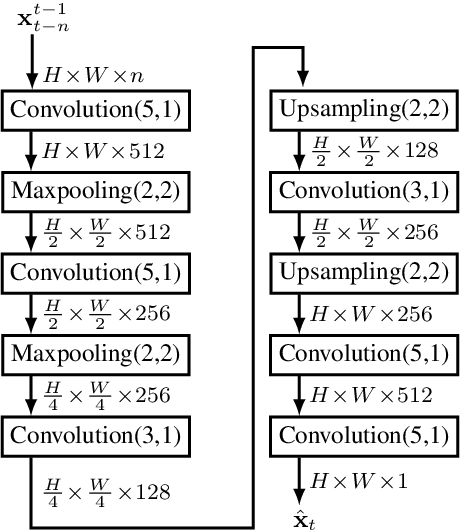
The progress in autonomous driving is also due to the increased availability of vast amounts of training data for the underlying machine learning approaches. Machine learning systems are generally known to lack robustness, e.g., if the training data did rarely or not at all cover critical situations. The challenging task of corner case detection in video, which is also somehow related to unusual event or anomaly detection, aims at detecting these unusual situations, which could become critical, and to communicate this to the autonomous driving system (online use case). Such a system, however, could be also used in offline mode to screen vast amounts of data and select only the relevant situations for storing and (re)training machine learning algorithms. So far, the approaches for corner case detection have been limited to videos recorded from a fixed camera, mostly for security surveillance. In this paper, we provide a formal definition of a corner case and propose a system framework for both the online and the offline use case that can handle video signals from front cameras of a naturally moving vehicle and can output a corner case score.