 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBird-Inspired Spatial Flapping Wing Mechanism via Coupled Linkages with Single Actuator
Apr 09, 2026Spatial single-loop mechanisms such as Bennett linkages offer a unique combination of one-degree-of-freedom actuation and nontrivial spatial trajectories, making them attractive for lightweight bio-inspired robotic design. However, although they appear simple and elegant, the geometric task-based synthesis is rather complicated and often avoided in engineering tasks due to the mathematical complexity involved. This paper presents a bird-inspired flapping-wing mechanism built from two coupled spatial four-bars, driven by a single motor. One linkage is actuated to generate the desired spatial sweeping stroke, while the serially coupled linkage remains unactuated and passively switches between extended and folded wing configurations over the stroke cycle. We introduce a simplified kinematic methodology for constructing Bennett linkages from quadrilaterals that contain a desired surface area and further leverage mechanically induced passive state switching. This architecture realizes a coordinated sweep-and-fold wing motion with a single actuation input, reducing weight and control complexity. A 3D-printed prototype is assembled and tested, demonstrating the intended spatial stroke and passive folding behavior.
Bistable Quad-Nets Composed of Four-Bar Linkages
Apr 01, 2026We study mechanical structures composed of spatial four-bar linkages that are bistable, that is, they allow for two distinct configurations. They have an interpretation as quad nets in the Study quadric which can be used to prove existence of arbitrarily large structures of this type. We propose a purely geometric construction of such examples, starting from infinitesimally flexible quad nets in Euclidean space and applying Whiteley de-averaging. This point of view situates the problem within the broader framework of discrete differential geometry and enables the construction of bistable structures from well-known classes of quad nets, such as discrete minimal surfaces. The proposed construction does not rely on numerical optimization and allows control over axis positions and snap angles.
Computer-Aided Design of Rational Motions for 4R and 6R Spatial Mechanism Synthesis
Feb 24, 2026This paper focuses on geometric methods for generating rational motions used in the design of single-loop rational linkages, 1-degree-of-freedom mechanisms that can execute prescribed spatial tasks. Building on established rational motion synthesis methods, we introduce a new interpolation scheme for seven 3D points based on cubic quaternionic Bezier curves. The resulting motion admits factorization, i.e. the synthesis of a spatial six-bar mechanism whose tool frame passes the specified seven points. To support engineering practice, we provide open-source CAD tools that implement also the other methods and provide fast visual evaluation of motion generation and mechanism synthesis.
Direct Kinematics, Inverse Kinematics, and Motion Planning of 1-DoF Rational Linkages
Sep 02, 2024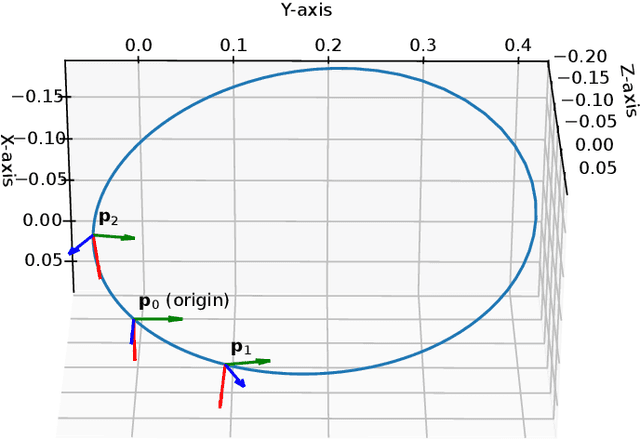
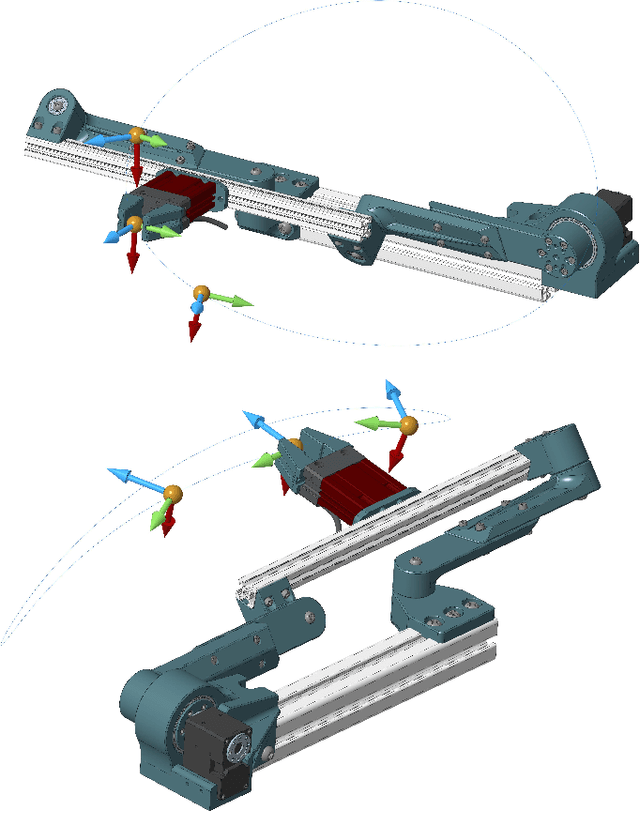
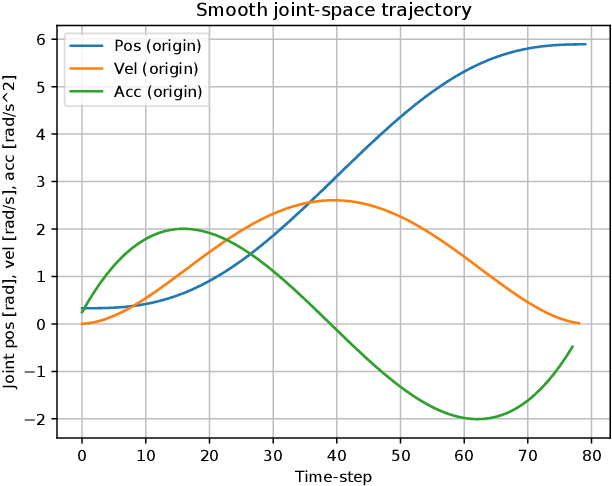
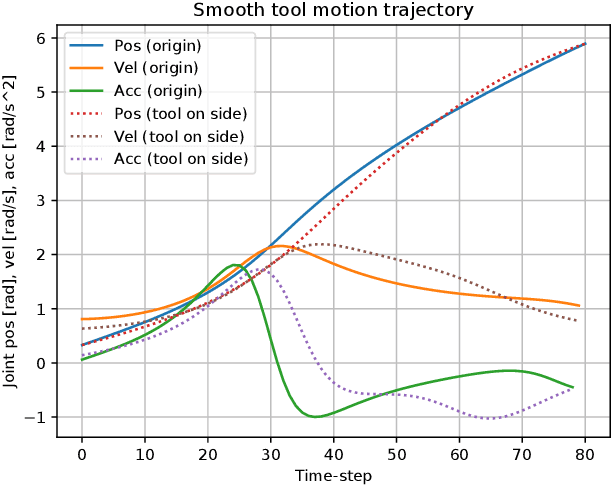
This study presents a set of algorithms that deal with trajectory planning of rational single-loop mechanisms with one degree-of-freedom (DoF). Benefiting from a dual quaternion representation of a rational motion, a formula for direct (forward) kinematics, a numerical inverse kinematics algorithm, and the generation of a driving-joint trajectory are provided. A novel approach using the Gauss-Newton search for the one-parameter inverse kinematics problem is presented. Additionally, a method for performing smooth equidistant travel of the tool is provided by applying arc-length reparameterization. This general approach can be applied to one-DoF mechanisms with four to seven joints characterized by a rational motion, without any additional geometrical analysis. An experiment was performed to demonstrate the usage in a laboratory setup.
Rational Linkages: From Poses to 3D-printed Prototypes
Mar 01, 2024In this paper, a set of tools is introduced that simplifies the synthesis and rapid-prototyping of single-loop rational kinematic chains. It allows the user to perform rational motion interpolation of up to four given poses and yields the design parameters of a linkage that can execute this motion. The package also provides a visualization of the output and performs a self-collision analysis with the possibility to adapt the design parameters. The results can be imported into CAD-systems for fast 3D printing.
An Automated Conversion Between Selected Robot Kinematic Representations
Apr 06, 2022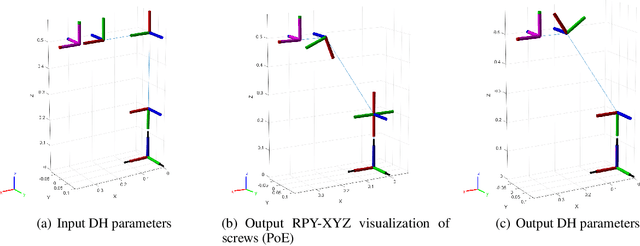
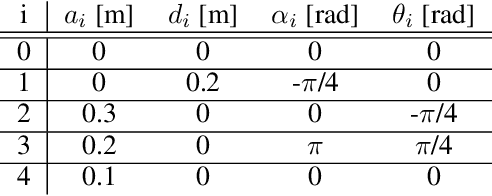
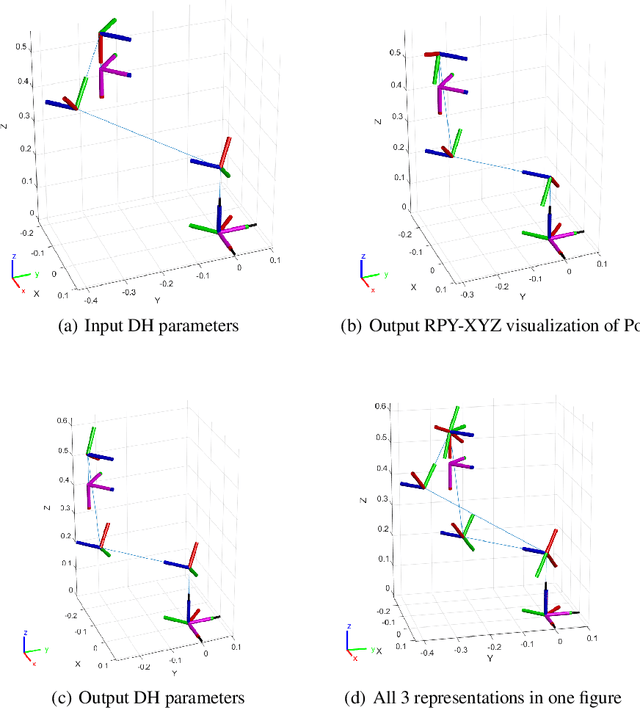
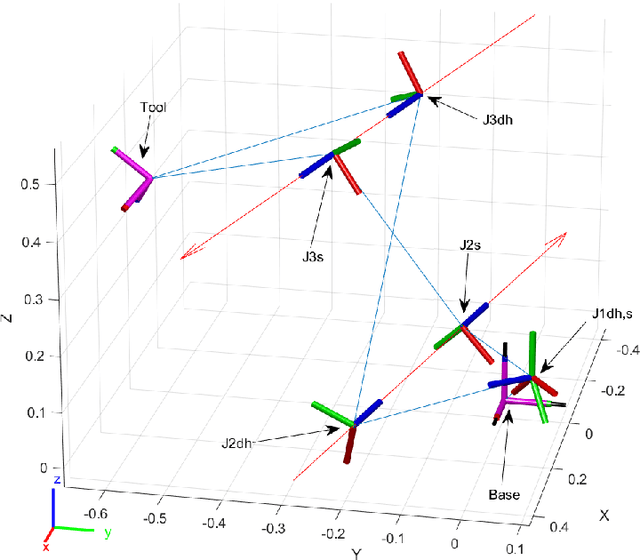
This paper presents a methodology that forms an automated tool for robot kinematic representation conversion, called the RobKin Interpreter. It is a set of analytical algorithms that can analyze an input robot representation, express the joints globally in matrix form, and map to other representations such as standard Denavit-Hartenberg parameters, Roll-Pitch-Yaw angles with translational displacement, and Product of Exponentials with a possibility to generate a URDF (Universal Robot Description Format) file from any of them. It works for revolute and prismatic joints and can interpret even arbitrary kinematic structures that do not have orthogonally placed joints.