Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Automated Conversion Between Selected Robot Kinematic Representations
Apr 06, 2022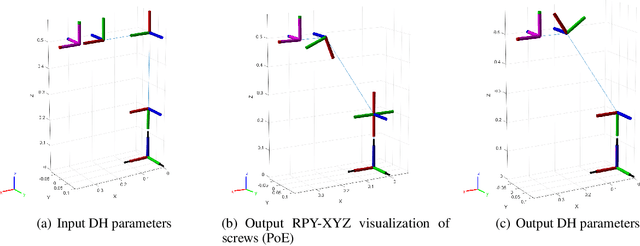
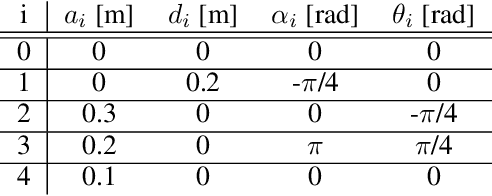
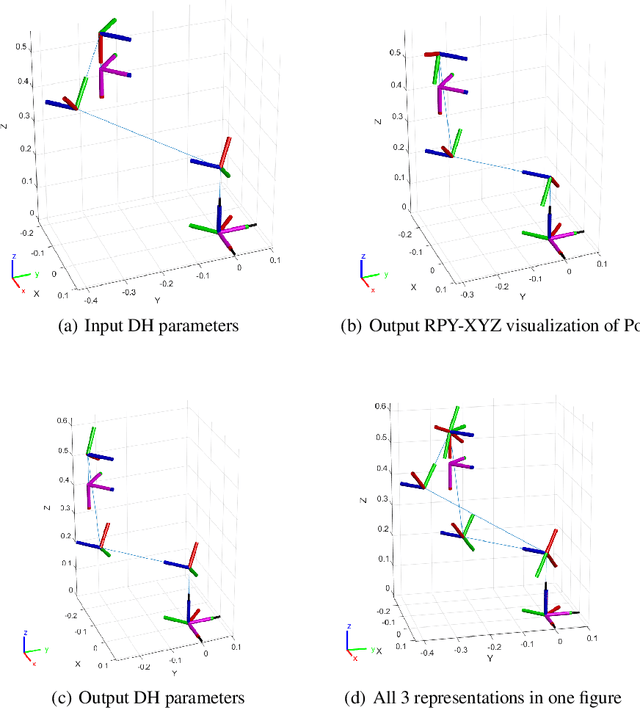
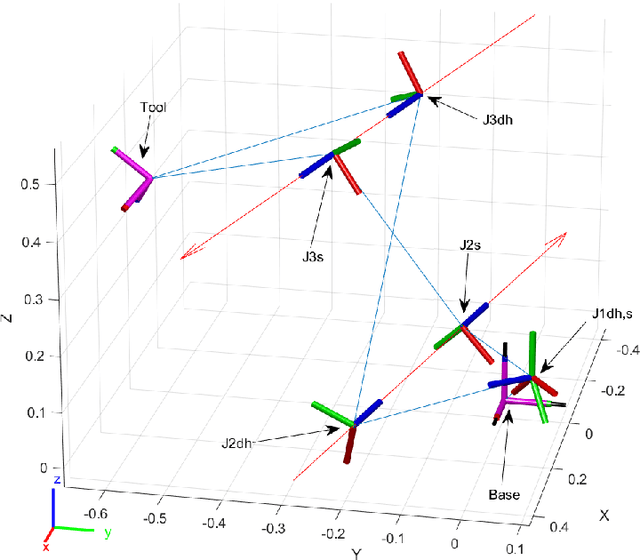
This paper presents a methodology that forms an automated tool for robot kinematic representation conversion, called the RobKin Interpreter. It is a set of analytical algorithms that can analyze an input robot representation, express the joints globally in matrix form, and map to other representations such as standard Denavit-Hartenberg parameters, Roll-Pitch-Yaw angles with translational displacement, and Product of Exponentials with a possibility to generate a URDF (Universal Robot Description Format) file from any of them. It works for revolute and prismatic joints and can interpret even arbitrary kinematic structures that do not have orthogonally placed joints.
Via