 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformation-Dense Reasoning for Efficient and Auditable Security Alert Triage
Dec 09, 2025Security Operations Centers face massive, heterogeneous alert streams under minute-level service windows, creating the Alert Triage Latency Paradox: verbose reasoning chains ensure accuracy and compliance but incur prohibitive latency and token costs, while minimal chains sacrifice transparency and auditability. Existing solutions fail: signature systems are brittle, anomaly methods lack actionability, and fully cloud-hosted LLMs raise latency, cost, and privacy concerns. We propose AIDR, a hybrid cloud-edge framework that addresses this trade-off through constrained information-density optimization. The core innovation is gradient-based compression of reasoning chains to retain only decision-critical steps--minimal evidence sufficient to justify predictions while respecting token and latency budgets. We demonstrate that this approach preserves decision-relevant information while minimizing complexity. We construct compact datasets by distilling alerts into 3-5 high-information bullets (68% token reduction), train domain-specialized experts via LoRA, and deploy a cloud-edge architecture: a cloud LLM routes alerts to on-premises experts generating SOAR-ready JSON. Experiments demonstrate AIDR achieves higher accuracy and 40.6% latency reduction versus Chain-of-Thought, with robustness to data corruption and out-of-distribution generalization, enabling auditable and efficient SOC triage with full data residency compliance.
A Clinical-grade Universal Foundation Model for Intraoperative Pathology
Oct 06, 2025Intraoperative pathology is pivotal to precision surgery, yet its clinical impact is constrained by diagnostic complexity and the limited availability of high-quality frozen-section data. While computational pathology has made significant strides, the lack of large-scale, prospective validation has impeded its routine adoption in surgical workflows. Here, we introduce CRISP, a clinical-grade foundation model developed on over 100,000 frozen sections from eight medical centers, specifically designed to provide Clinical-grade Robust Intraoperative Support for Pathology (CRISP). CRISP was comprehensively evaluated on more than 15,000 intraoperative slides across nearly 100 retrospective diagnostic tasks, including benign-malignant discrimination, key intraoperative decision-making, and pan-cancer detection, etc. The model demonstrated robust generalization across diverse institutions, tumor types, and anatomical sites-including previously unseen sites and rare cancers. In a prospective cohort of over 2,000 patients, CRISP sustained high diagnostic accuracy under real-world conditions, directly informing surgical decisions in 92.6% of cases. Human-AI collaboration further reduced diagnostic workload by 35%, avoided 105 ancillary tests and enhanced detection of micrometastases with 87.5% accuracy. Together, these findings position CRISP as a clinical-grade paradigm for AI-driven intraoperative pathology, bridging computational advances with surgical precision and accelerating the translation of artificial intelligence into routine clinical practice.
Modeling and Inferring Human Intents and Latent Functional Objects for Trajectory Prediction
Jun 24, 2016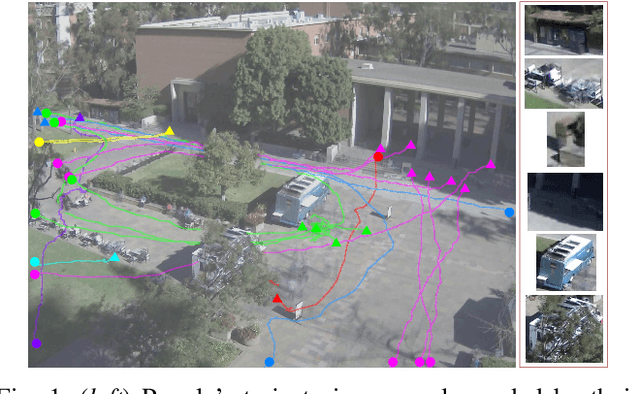
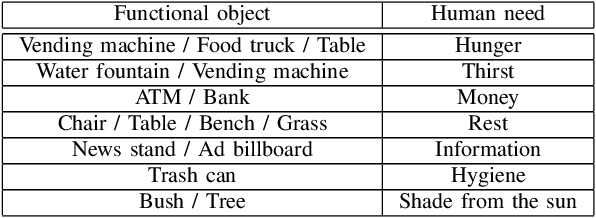
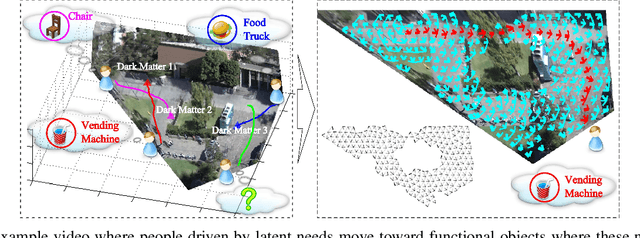
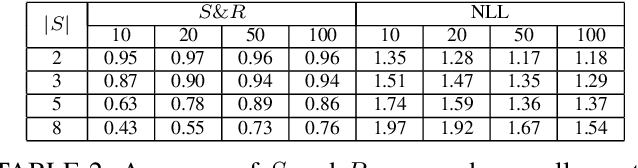
This paper is about detecting functional objects and inferring human intentions in surveillance videos of public spaces. People in the videos are expected to intentionally take shortest paths toward functional objects subject to obstacles, where people can satisfy certain needs (e.g., a vending machine can quench thirst), by following one of three possible intent behaviors: reach a single functional object and stop, or sequentially visit several functional objects, or initially start moving toward one goal but then change the intent to move toward another. Since detecting functional objects in low-resolution surveillance videos is typically unreliable, we call them "dark matter" characterized by the functionality to attract people. We formulate the Agent-based Lagrangian Mechanics wherein human trajectories are probabilistically modeled as motions of agents in many layers of "dark-energy" fields, where each agent can select a particular force field to affect its motions, and thus define the minimum-energy Dijkstra path toward the corresponding source "dark matter". For evaluation, we compiled and annotated a new dataset. The results demonstrate our effectiveness in predicting human intent behaviors and trajectories, and localizing functional objects, as well as discovering distinct functional classes of objects by clustering human motion behavior in the vicinity of functional objects.
Joint Inference of Groups, Events and Human Roles in Aerial Videos
May 22, 2015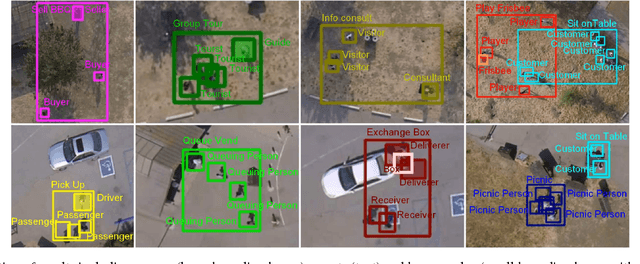
With the advent of drones, aerial video analysis becomes increasingly important; yet, it has received scant attention in the literature. This paper addresses a new problem of parsing low-resolution aerial videos of large spatial areas, in terms of 1) grouping, 2) recognizing events and 3) assigning roles to people engaged in events. We propose a novel framework aimed at conducting joint inference of the above tasks, as reasoning about each in isolation typically fails in our setting. Given noisy tracklets of people and detections of large objects and scene surfaces (e.g., building, grass), we use a spatiotemporal AND-OR graph to drive our joint inference, using Markov Chain Monte Carlo and dynamic programming. We also introduce a new formalism of spatiotemporal templates characterizing latent sub-events. For evaluation, we have collected and released a new aerial videos dataset using a hex-rotor flying over picnic areas rich with group events. Our results demonstrate that we successfully address above inference tasks under challenging conditions.