 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and Inferring Human Intents and Latent Functional Objects for Trajectory Prediction
Paper and Code
Jun 24, 2016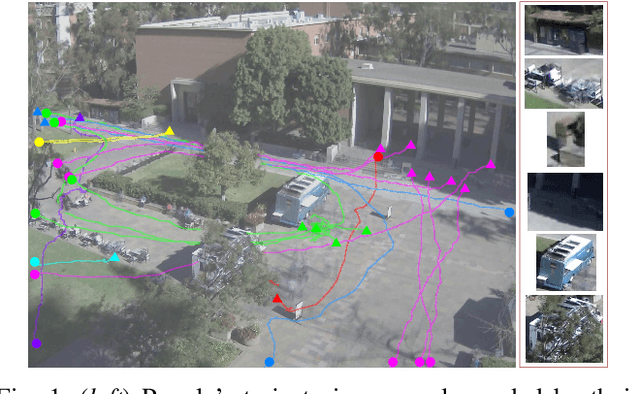
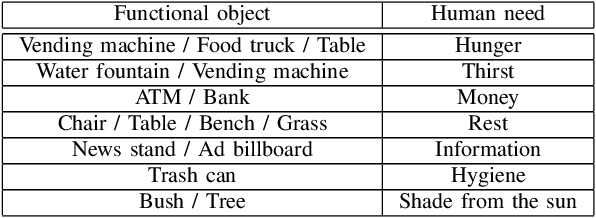
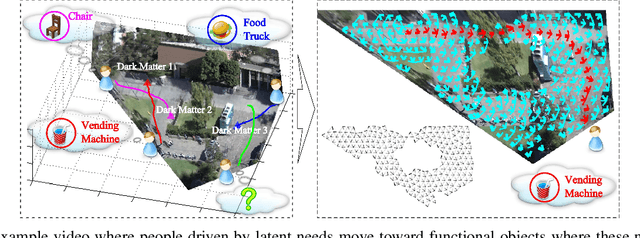
This paper is about detecting functional objects and inferring human intentions in surveillance videos of public spaces. People in the videos are expected to intentionally take shortest paths toward functional objects subject to obstacles, where people can satisfy certain needs (e.g., a vending machine can quench thirst), by following one of three possible intent behaviors: reach a single functional object and stop, or sequentially visit several functional objects, or initially start moving toward one goal but then change the intent to move toward another. Since detecting functional objects in low-resolution surveillance videos is typically unreliable, we call them "dark matter" characterized by the functionality to attract people. We formulate the Agent-based Lagrangian Mechanics wherein human trajectories are probabilistically modeled as motions of agents in many layers of "dark-energy" fields, where each agent can select a particular force field to affect its motions, and thus define the minimum-energy Dijkstra path toward the corresponding source "dark matter". For evaluation, we compiled and annotated a new dataset. The results demonstrate our effectiveness in predicting human intent behaviors and trajectories, and localizing functional objects, as well as discovering distinct functional classes of objects by clustering human motion behavior in the vicinity of functional objects.