 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMatching in the Dark: A Dataset for Matching Image Pairs of Low-light Scenes
Sep 14, 2021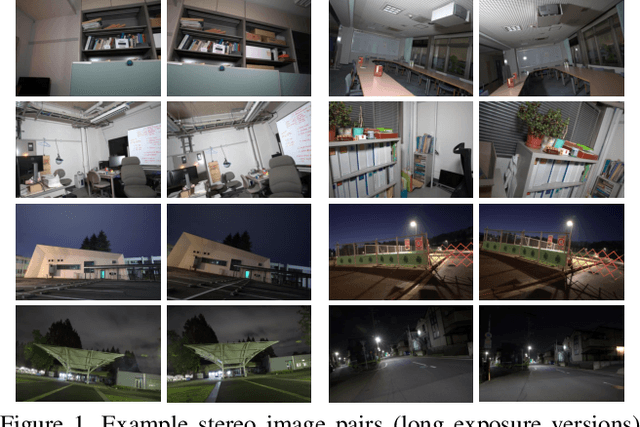
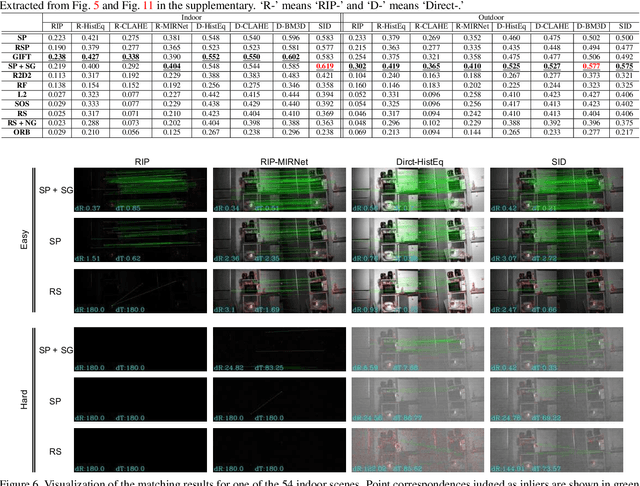


This paper considers matching images of low-light scenes, aiming to widen the frontier of SfM and visual SLAM applications. Recent image sensors can record the brightness of scenes with more than eight-bit precision, available in their RAW-format image. We are interested in making full use of such high-precision information to match extremely low-light scene images that conventional methods cannot handle. For extreme low-light scenes, even if some of their brightness information exists in the RAW format images' low bits, the standard raw image processing on cameras fails to utilize them properly. As was recently shown by Chen et al., CNNs can learn to produce images with a natural appearance from such RAW-format images. To consider if and how well we can utilize such information stored in RAW-format images for image matching, we have created a new dataset named MID (matching in the dark). Using it, we experimentally evaluated combinations of eight image-enhancing methods and eleven image matching methods consisting of classical/neural local descriptors and classical/neural initial point-matching methods. The results show the advantage of using the RAW-format images and the strengths and weaknesses of the above component methods. They also imply there is room for further research.