 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShadowless Projection Mapping for Tabletop Workspaces with Synthetic Aperture Projector
Mar 12, 2026Projection mapping (PM) enables augmented reality (AR) experiences without requiring users to wear head-mounted displays and supports multi-user interaction. It is regarded as a promising technology for a variety of applications in which users interact with content superimposed onto augmented objects in tabletop workspaces, including remote collaboration, healthcare, industrial design, urban planning, artwork creation, and office work. However, conventional PM systems often suffer from projection shadows when users occlude the light path. Prior approaches employing multiple distributed projectors can compensate for occlusion, but suffer from latency due to computational processing, degrading the user experience. In this research, we introduce a synthetic-aperture PM system that uses a significantly larger number of projectors, arranged densely in the environment, to achieve delay-free, shadowless projection for tabletop workspaces without requiring computational compensation. To address spatial resolution degradation caused by subpixel misalignment among overlaid projections, we develop and validate an offline blur compensation method whose computation time remains independent of the number of projectors. Furthermore, we demonstrate that our shadowless PM plays a critical role in achieving a fundamental goal of PM: altering material properties without evoking projection-like impression. Specifically, we define this perceptual impression as ``sense of projection (SoP)'' and establish a PM design framework to minimize the SoP based on user studies.
Efficient Proxy Raytracer for Optical Systems using Implicit Neural Representations
Jul 28, 2025Ray tracing is a widely used technique for modeling optical systems, involving sequential surface-by-surface computations, which can be computationally intensive. We propose Ray2Ray, a novel method that leverages implicit neural representations to model optical systems with greater efficiency, eliminating the need for surface-by-surface computations in a single pass end-to-end model. Ray2Ray learns the mapping between rays emitted from a given source and their corresponding rays after passing through a given optical system in a physically accurate manner. We train Ray2Ray on nine off-the-shelf optical systems, achieving positional errors on the order of 1{\mu}m and angular deviations on the order 0.01 degrees in the estimated output rays. Our work highlights the potential of neural representations as a proxy for optical raytracer.
Neural Projection Mapping Using Reflectance Fields
Jun 11, 2023



We introduce a high resolution spatially adaptive light source, or a projector, into a neural reflectance field that allows to both calibrate the projector and photo realistic light editing. The projected texture is fully differentiable with respect to all scene parameters, and can be optimized to yield a desired appearance suitable for applications in augmented reality and projection mapping. Our neural field consists of three neural networks, estimating geometry, material, and transmittance. Using an analytical BRDF model and carefully selected projection patterns, our acquisition process is simple and intuitive, featuring a fixed uncalibrated projected and a handheld camera with a co-located light source. As we demonstrate, the virtual projector incorporated into the pipeline improves scene understanding and enables various projection mapping applications, alleviating the need for time consuming calibration steps performed in a traditional setting per view or projector location. In addition to enabling novel viewpoint synthesis, we demonstrate state-of-the-art performance projector compensation for novel viewpoints, improvement over the baselines in material and scene reconstruction, and three simply implemented scenarios where projection image optimization is performed, including the use of a 2D generative model to consistently dictate scene appearance from multiple viewpoints. We believe that neural projection mapping opens up the door to novel and exciting downstream tasks, through the joint optimization of the scene and projection images.
Directionally Decomposing Structured Light for Projector Calibration
Oct 08, 2021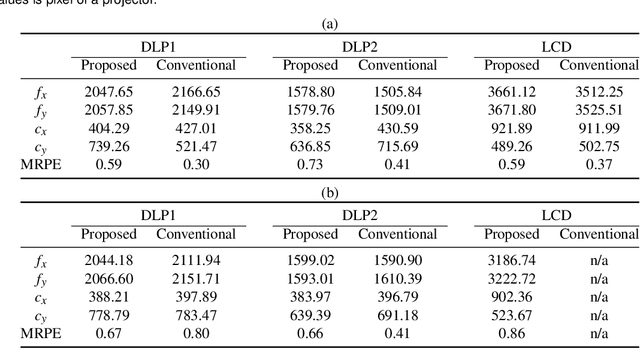
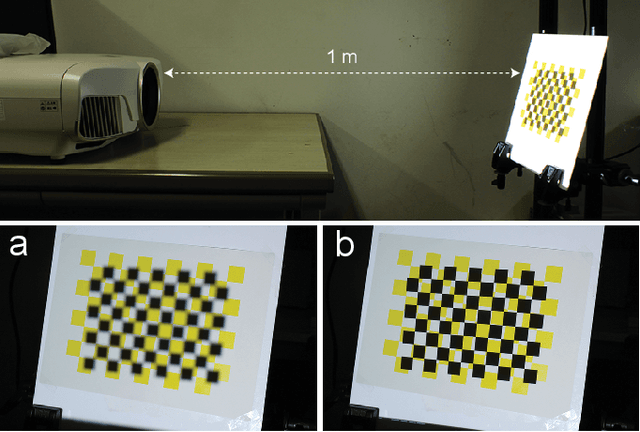
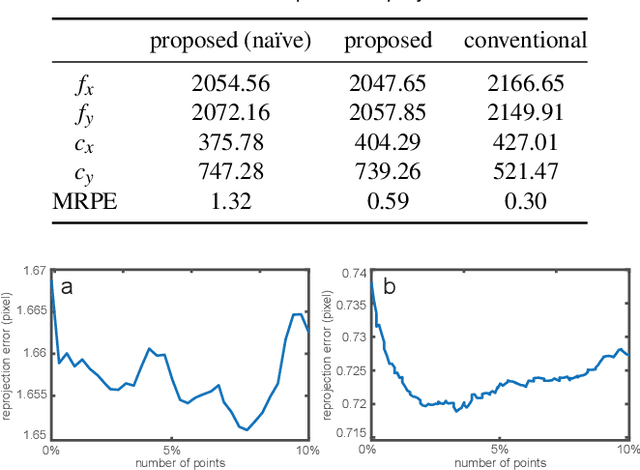
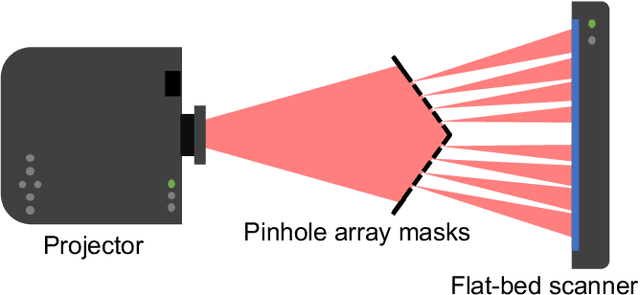
Intrinsic projector calibration is essential in projection mapping (PM) applications, especially in dynamic PM. However, due to the shallow depth-of-field (DOF) of a projector, more work is needed to ensure accurate calibration. We aim to estimate the intrinsic parameters of a projector while avoiding the limitation of shallow DOF. As the core of our technique, we present a practical calibration device that requires a minimal working volume directly in front of the projector lens regardless of the projector's focusing distance and aperture size. The device consists of a flat-bed scanner and pinhole-array masks. For calibration, a projector projects a series of structured light patterns in the device. The pinholes directionally decompose the structured light, and only the projected rays that pass through the pinholes hit the scanner plane. For each pinhole, we extract a ray passing through the optical center of the projector. Consequently, we regard the projector as a pinhole projector that projects the extracted rays only, and we calibrate the projector by applying the standard camera calibration technique, which assumes a pinhole camera model. Using a proof-of-concept prototype, we demonstrate that our technique can calibrate projectors with different focusing distances and aperture sizes at the same accuracy as a conventional method. Finally, we confirm that our technique can provide intrinsic parameters accurate enough for a dynamic PM application, even when a projector is placed too far from a projection target for a conventional method to calibrate the projector using a fiducial object of reasonable size.
Multifocal Stereoscopic Projection Mapping
Oct 08, 2021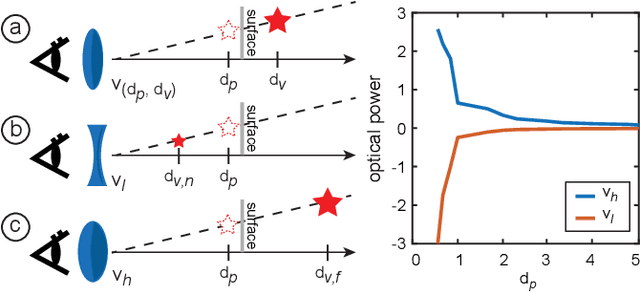
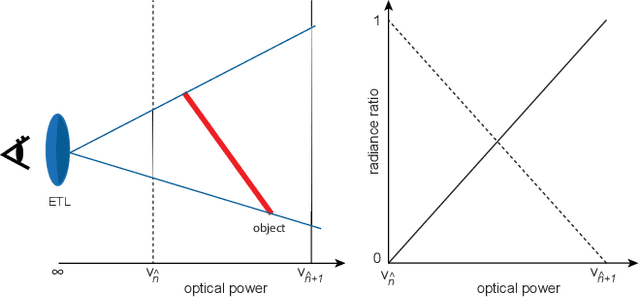
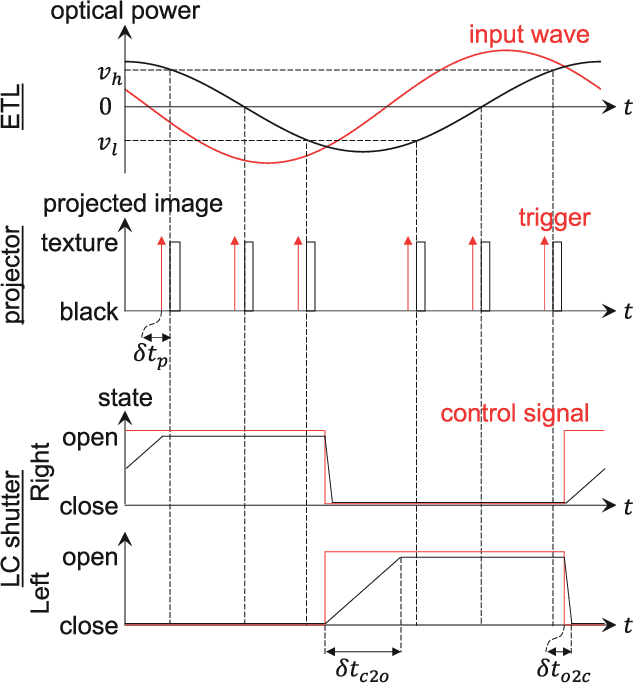
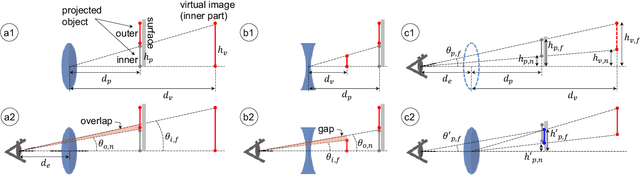
Stereoscopic projection mapping (PM) allows a user to see a three-dimensional (3D) computer-generated (CG) object floating over physical surfaces of arbitrary shapes around us using projected imagery. However, the current stereoscopic PM technology only satisfies binocular cues and is not capable of providing correct focus cues, which causes a vergence--accommodation conflict (VAC). Therefore, we propose a multifocal approach to mitigate VAC in stereoscopic PM. Our primary technical contribution is to attach electrically focus-tunable lenses (ETLs) to active shutter glasses to control both vergence and accommodation. Specifically, we apply fast and periodical focal sweeps to the ETLs, which causes the "virtual image'" (as an optical term) of a scene observed through the ETLs to move back and forth during each sweep period. A 3D CG object is projected from a synchronized high-speed projector only when the virtual image of the projected imagery is located at a desired distance. This provides an observer with the correct focus cues required. In this study, we solve three technical issues that are unique to stereoscopic PM: (1) The 3D CG object is displayed on non-planar and even moving surfaces; (2) the physical surfaces need to be shown without the focus modulation; (3) the shutter glasses additionally need to be synchronized with the ETLs and the projector. We also develop a novel compensation technique to deal with the "lens breathing" artifact that varies the retinal size of the virtual image through focal length modulation. Further, using a proof-of-concept prototype, we demonstrate that our technique can present the virtual image of a target 3D CG object at the correct depth. Finally, we validate the advantage provided by our technique by comparing it with conventional stereoscopic PM using a user study on a depth-matching task.
A Projector-Camera System Using Hybrid Pixels with Projection and Capturing Capabilities
Jul 11, 2021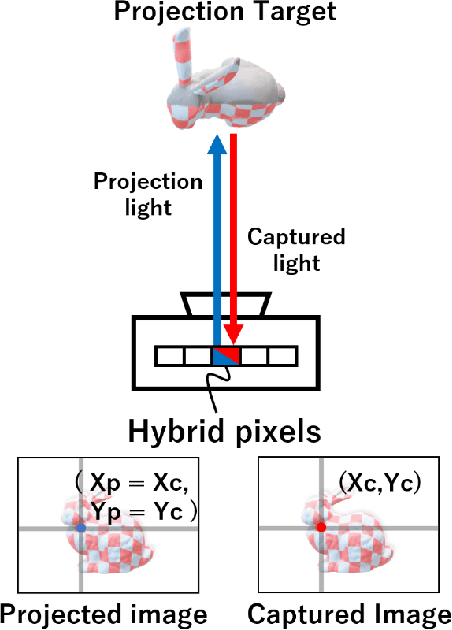
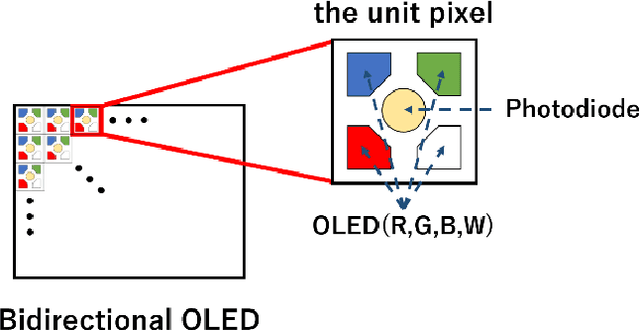
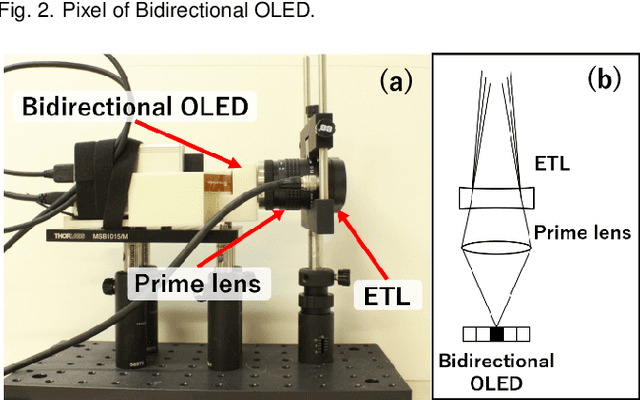
We propose a novel projector-camera system (ProCams) in which each pixel has both projection and capturing capabilities. Our proposed ProCams solves the difficulty of obtaining precise pixel correspondence between the projector and the camera. We implemented a proof-of-concept ProCams prototype and demonstrated its applicability to a dynamic projection mapping.
* Author's version of a paper published at IDW (International Display Workshops) 2020
Procams-Based Cybernetics
Oct 09, 2015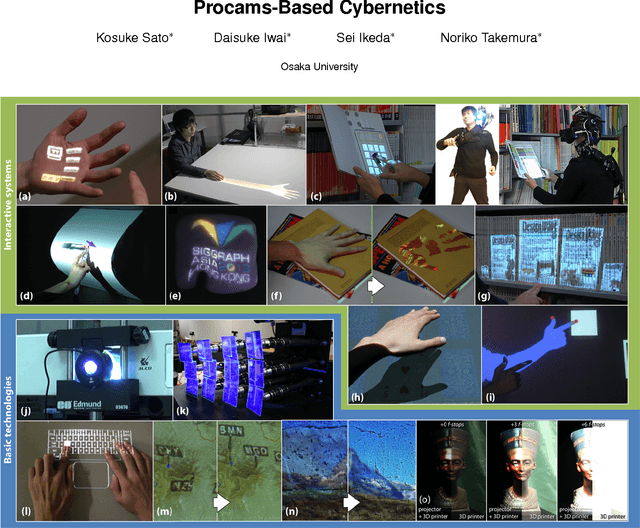

Procams-based cybernetics is a unique, emerging research field, which aims at enhancing and supporting our activities by naturally connecting human and computers/machines as a cooperative integrated system via projector-camera systems (procams). It rests on various research domains such as virtual/augmented reality, computer vision, computer graphics, projection display, human computer interface, human robot interaction and so on. This laboratory presentation provides a brief history including recent achievements of our procams-based cybernetics project.