 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn iterative closest point method for measuring the level of similarity of 3d log scans in wood industry
Oct 23, 2017
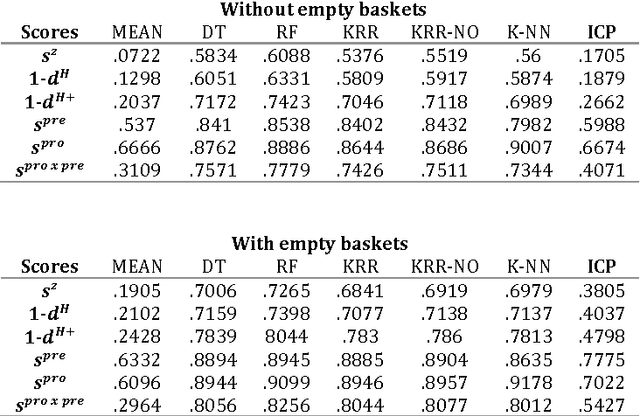
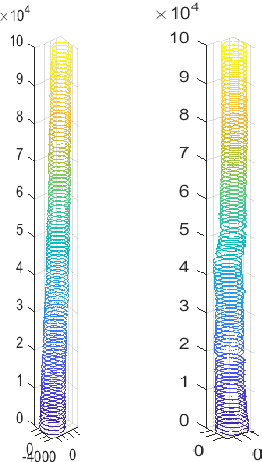

In the Canadian's lumber industry, simulators are used to predict the lumbers resulting from the sawing of a log at a given sawmill. Giving a log or several logs' 3D scans as input, simulators perform a real-time job to predict the lumbers. These simulators, however, tend to be slow at processing large volume of wood. We thus explore an alternative approximation techniques based on the Iterative Closest Point (ICP) algorithm to identify the already processed log to which an unseen log resembles the most. The main benefit of the ICP approach is that it can easily handle 3D scans with a variable number of points. We compare this ICP-based nearest neighbor predictor, to predictors built using machine learning algorithms such as the K-nearest-neighbor (kNN) and Random Forest (RF). The implemented ICP-based predictor enabled us to identify key points in using the 3D scans directly for distance calculation. The long-term goal of this ongoing research is to integrated ICP distance calculations and machine learning.