 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVERF: Runtime Monitoring of Pose Estimation with Neural Radiance Fields
Aug 11, 2023We present VERF, a collection of two methods (VERF-PnP and VERF-Light) for providing runtime assurance on the correctness of a camera pose estimate of a monocular camera without relying on direct depth measurements. We leverage the ability of NeRF (Neural Radiance Fields) to render novel RGB perspectives of a scene. We only require as input the camera image whose pose is being estimated, an estimate of the camera pose we want to monitor, and a NeRF model containing the scene pictured by the camera. We can then predict if the pose estimate is within a desired distance from the ground truth and justify our prediction with a level of confidence. VERF-Light does this by rendering a viewpoint with NeRF at the estimated pose and estimating its relative offset to the sensor image up to scale. Since scene scale is unknown, the approach renders another auxiliary image and reasons over the consistency of the optical flows across the three images. VERF-PnP takes a different approach by rendering a stereo pair of images with NeRF and utilizing the Perspective-n-Point (PnP) algorithm. We evaluate both methods on the LLFF dataset, on data from a Unitree A1 quadruped robot, and on data collected from Blue Origin's sub-orbital New Shepard rocket to demonstrate the effectiveness of the proposed pose monitoring method across a range of scene scales. We also show monitoring can be completed in under half a second on a 3090 GPU.
Vision-Based Terrain Relative Navigation on High-Altitude Balloon and Sub-Orbital Rocket
Feb 16, 2023
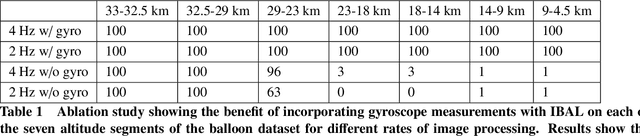
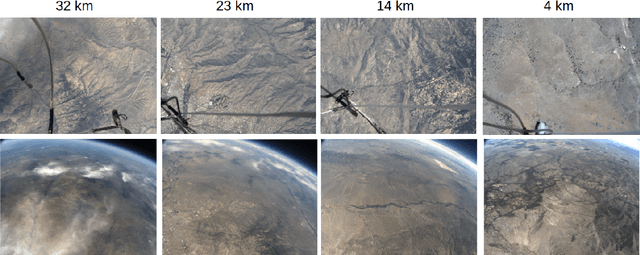
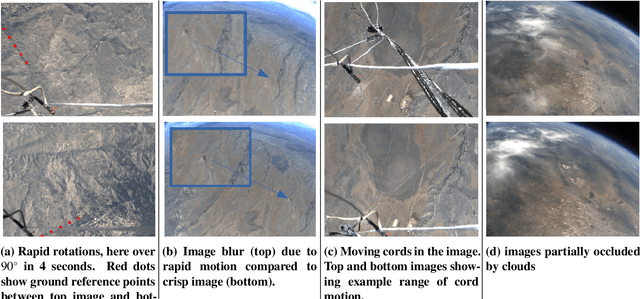
We present an experimental analysis on the use of a camera-based approach for high-altitude navigation by associating mapped landmarks from a satellite image database to camera images, and by leveraging inertial sensors between camera frames. We evaluate performance of both a sideways-tilted and downward-facing camera on data collected from a World View Enterprises high-altitude balloon with data beginning at an altitude of 33 km and descending to near ground level (4.5 km) with 1.5 hours of flight time. We demonstrate less than 290 meters of average position error over a trajectory of more than 150 kilometers. In addition to showing performance across a range of altitudes, we also demonstrate the robustness of the Terrain Relative Navigation (TRN) method to rapid rotations of the balloon, in some cases exceeding 20 degrees per second, and to camera obstructions caused by both cloud coverage and cords swaying underneath the balloon. Additionally, we evaluate performance on data collected by two cameras inside the capsule of Blue Origin's New Shepard rocket on payload flight NS-23, traveling at speeds up to 880 km/hr, and demonstrate less than 55 meters of average position error.
* Published in 2023 AIAA SciTech
Loc-NeRF: Monte Carlo Localization using Neural Radiance Fields
Sep 19, 2022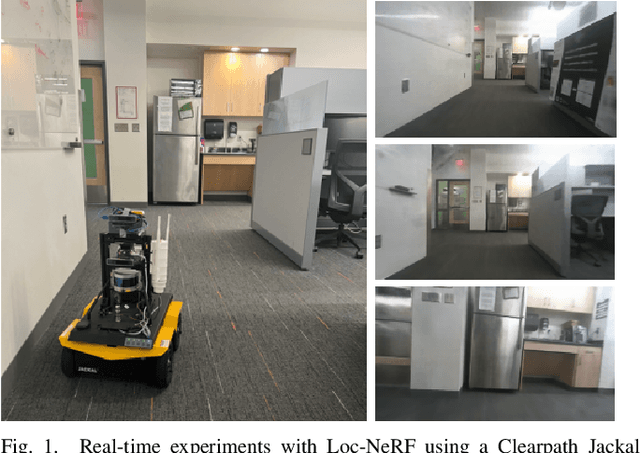
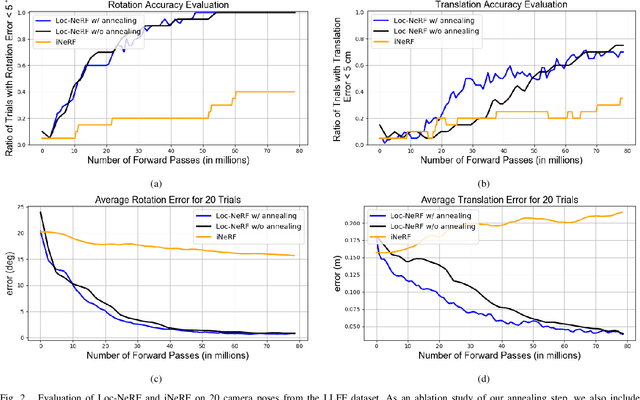
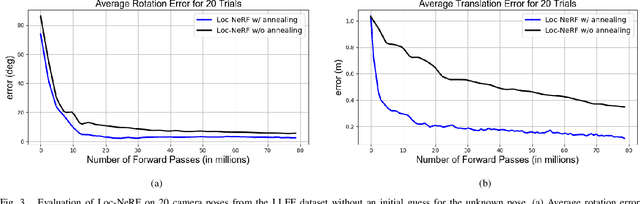
We present Loc-NeRF, a real-time vision-based robot localization approach that combines Monte Carlo localization and Neural Radiance Fields (NeRF). Our system uses a pre-trained NeRF model as the map of an environment and can localize itself in real-time using an RGB camera as the only exteroceptive sensor onboard the robot. While neural radiance fields have seen significant applications for visual rendering in computer vision and graphics, they have found limited use in robotics. Existing approaches for NeRF-based localization require both a good initial pose guess and significant computation, making them impractical for real-time robotics applications. By using Monte Carlo localization as a workhorse to estimate poses using a NeRF map model, Loc-NeRF is able to perform localization faster than the state of the art and without relying on an initial pose estimate. In addition to testing on synthetic data, we also run our system using real data collected by a Clearpath Jackal UGV and demonstrate for the first time the ability to perform real-time global localization with neural radiance fields. We make our code publicly available at https://github.com/MIT-SPARK/Loc-NeRF.