 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle-to-Vehicle Charging: Model, Complexity, and Heuristics
Apr 12, 2024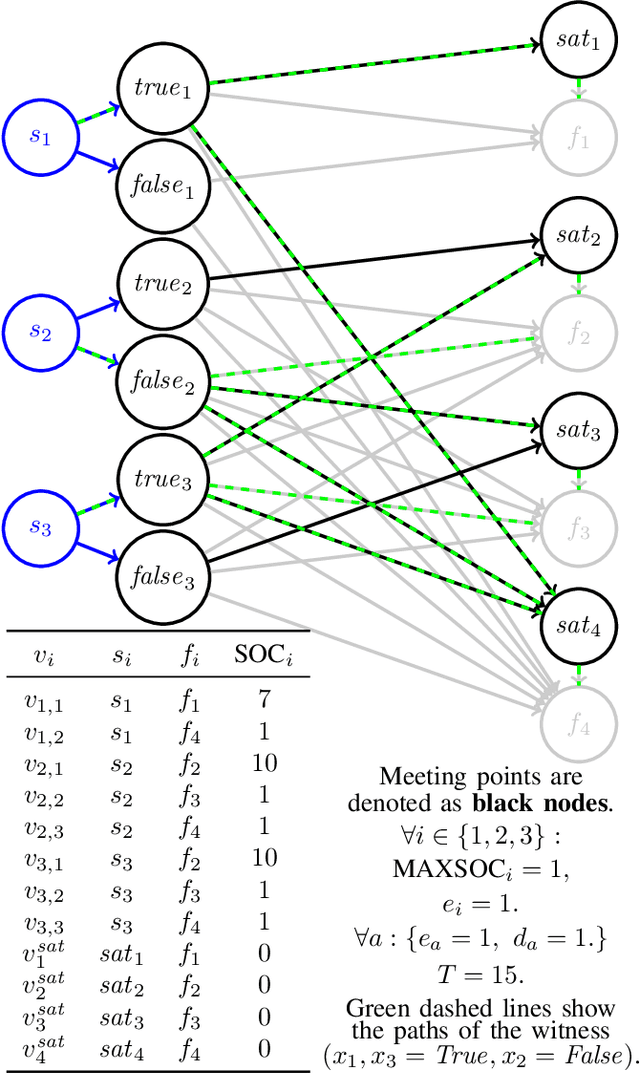
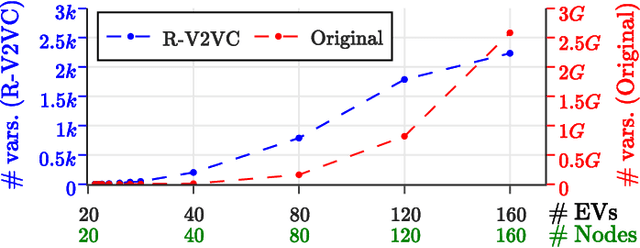
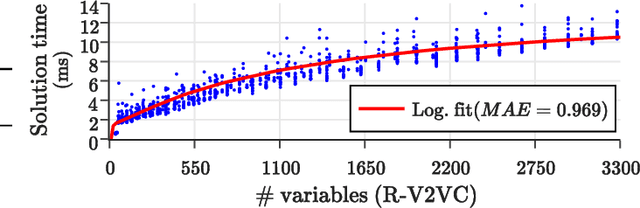
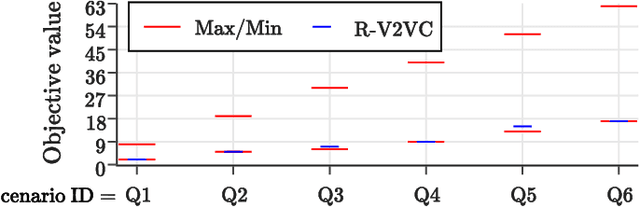
The rapid adoption of Electric Vehicles (EVs) poses challenges for electricity grids to accommodate or mitigate peak demand. Vehicle-to-Vehicle Charging (V2VC) has been recently adopted by popular EVs, posing new opportunities and challenges to the management and operation of EVs. We present a novel V2VC model that allows decision-makers to take V2VC into account when optimizing their EV operations. We show that optimizing V2VC is NP-Complete and find that even small problem instances are computationally challenging. We propose R-V2VC, a heuristic that takes advantage of the resulting totally unimodular constraint matrix to efficiently solve problems of realistic sizes. Our results demonstrate that R-V2VC presents a linear growth in the solution time as the problem size increases, while achieving solutions of optimal or near-optimal quality. R-V2VC can be used for real-world operations and to study what-if scenarios when evaluating the costs and benefits of V2VC.
Model-Based Monitoring and State Estimation for Digital Twins: The Kalman Filter
Apr 29, 2023

A digital twin (DT) monitors states of the physical twin (PT) counterpart and provides a number of benefits such as advanced visualizations, fault detection capabilities, and reduced maintenance cost. It is the ability to be able to detect the states inside the DT that enable such benefits. In order to estimate the desired states of a PT, we propose the use of a Kalman Filter (KF). In this tutorial, we provide an introduction and detailed derivation of the KF. We demonstrate the use of KF to monitor and anomaly detection through an incubator system. Our experimental result shows that KF successfully can detect the anomaly during monitoring.
Constructing Neural Network-Based Models for Simulating Dynamical Systems
Nov 02, 2021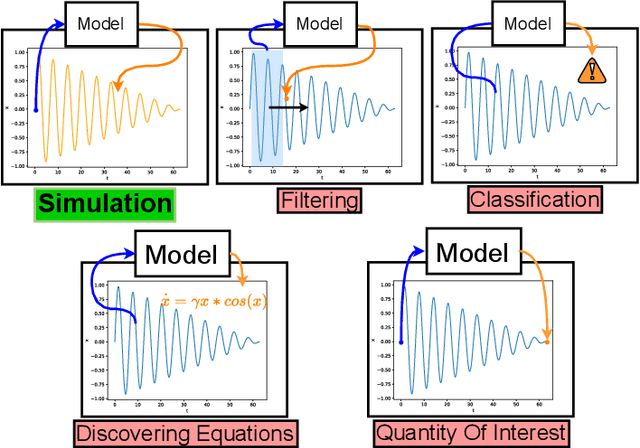

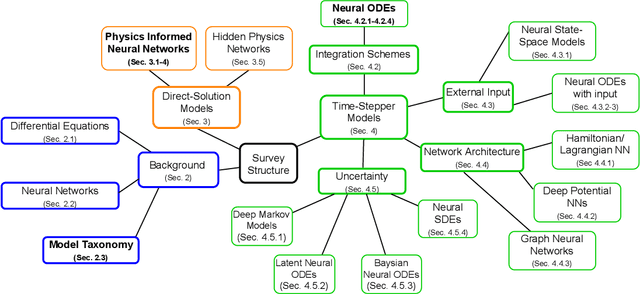
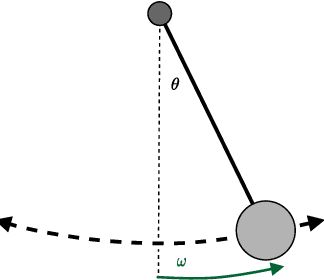
Dynamical systems see widespread use in natural sciences like physics, biology, chemistry, as well as engineering disciplines such as circuit analysis, computational fluid dynamics, and control. For simple systems, the differential equations governing the dynamics can be derived by applying fundamental physical laws. However, for more complex systems, this approach becomes exceedingly difficult. Data-driven modeling is an alternative paradigm that seeks to learn an approximation of the dynamics of a system using observations of the true system. In recent years, there has been an increased interest in data-driven modeling techniques, in particular neural networks have proven to provide an effective framework for solving a wide range of tasks. This paper provides a survey of the different ways to construct models of dynamical systems using neural networks. In addition to the basic overview, we review the related literature and outline the most significant challenges from numerical simulations that this modeling paradigm must overcome. Based on the reviewed literature and identified challenges, we provide a discussion on promising research areas.