 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReducing Memory Contention and I/O Congestion for Disk-based GNN Training
Jun 20, 2024Graph neural networks (GNNs) gain wide popularity. Large graphs with high-dimensional features become common and training GNNs on them is non-trivial on an ordinary machine. Given a gigantic graph, even sample-based GNN training cannot work efficiently, since it is difficult to keep the graph's entire data in memory during the training process. Leveraging a solid-state drive (SSD) or other storage devices to extend the memory space has been studied in training GNNs. Memory and I/Os are hence critical for effectual disk-based training. We find that state-of-the-art (SoTA) disk-based GNN training systems severely suffer from issues like the memory contention between a graph's topological and feature data, and severe I/O congestion upon loading data from SSD for training. We accordingly develop GNNDrive. GNNDrive 1) minimizes the memory footprint with holistic buffer management across sampling and extracting, and 2) avoids I/O congestion through a strategy of asynchronous feature extraction. It also avoids costly data preparation on the critical path and makes the most of software and hardware resources. Experiments show that GNNDrive achieves superior performance. For example, when training with the Papers100M dataset and GraphSAGE model, GNNDrive is faster than SoTA PyG+, Ginex, and MariusGNN by 16.9x, 2.6x, and 2.7x, respectively.
Securing Autonomous Service Robots through Fuzzing, Detection, and Mitigation
Mar 12, 2020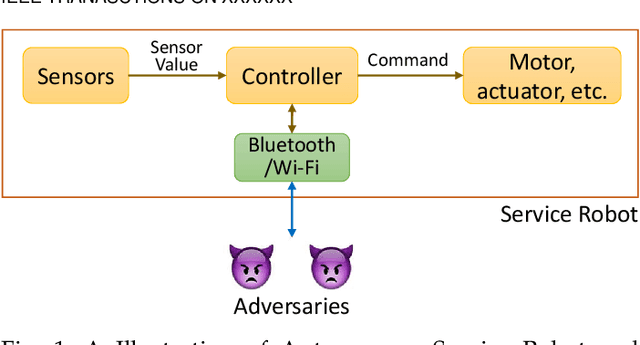


Autonomous service robots share social spaces with humans, usually working together for domestic or professional tasks. Cyber security breaches in such robots undermine the trust between humans and robots. In this paper, we investigate how to apprehend and inflict security threats at the design and implementation stage of a movable autonomous service robot. To this end, we leverage the idea of directed fuzzing and design RoboFuzz that systematically tests an autonomous service robot in line with the robot's states and the surrounding environment. The methodology of RoboFuzz is to study critical environmental parameters affecting the robot's state transitions and subject the robot control program with rational but harmful sensor values so as to compromise the robot. Furthermore, we develop detection and mitigation algorithms to counteract the impact of RoboFuzz. The difficulties mainly lie in the trade-off among limited computation resources, timely detection and the retention of work efficiency in mitigation. In particular, we propose detection and mitigation methods that take advantage of historical records of obstacles to detect inconsistent obstacle appearances regarding untrustworthy sensor values and navigate the movable robot to continue moving so as to carry on a planned task. By doing so, we manage to maintain a low cost for detection and mitigation but also retain the robot's work efficacy. We have prototyped the bundle of RoboFuzz, detection and mitigation algorithms in a real-world movable robot. Experimental results confirm that RoboFuzz makes a success rate of up to 93.3% in imposing concrete threats to the robot while the overall loss of work efficacy is merely 4.1% at the mitigation mode.
Road Context-aware Intrusion Detection System for Autonomous Cars
Aug 02, 2019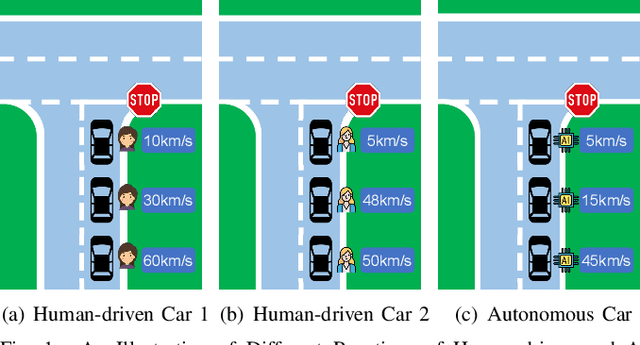
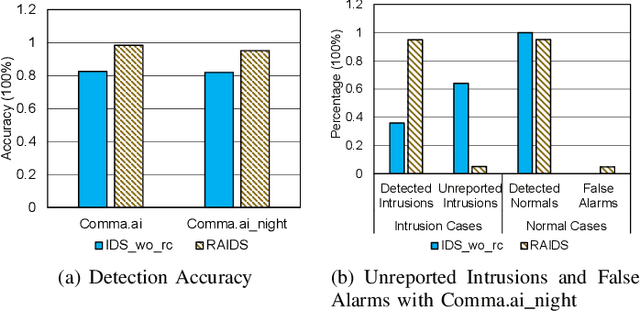
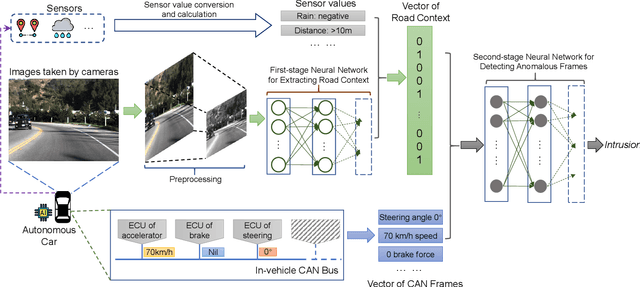
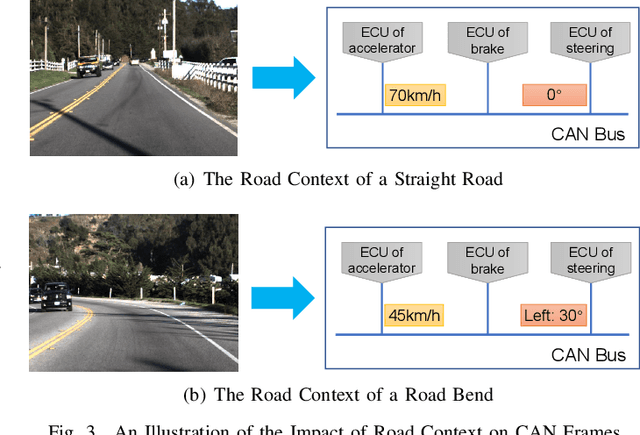
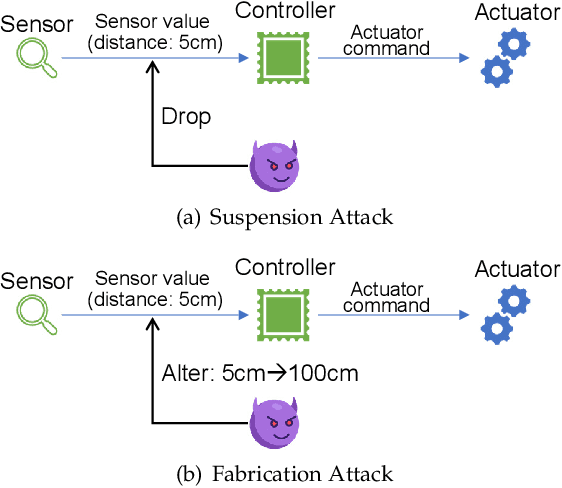
Security is of primary importance to vehicles. The viability of performing remote intrusions onto the in-vehicle network has been manifested. In regard to unmanned autonomous cars, limited work has been done to detect intrusions for them while existing intrusion detection systems (IDSs) embrace limitations against strong adversaries. In this paper, we consider the very nature of autonomous car and leverage the road context to build a novel IDS, named Road context-aware IDS (RAIDS). When a computer-controlled car is driving through continuous roads, road contexts and genuine frames transmitted on the car's in-vehicle network should resemble a regular and intelligible pattern. RAIDS hence employs a lightweight machine learning model to extract road contexts from sensory information (e.g., camera images and distance sensor values) that are used to generate control signals for maneuvering the car. With such ongoing road context, RAIDS validates corresponding frames observed on the in-vehicle network. Anomalous frames that substantially deviate from road context will be discerned as intrusions. We have implemented a prototype of RAIDS with neural networks, and conducted experiments on a Raspberry Pi with extensive datasets and meaningful intrusion cases. Evaluations show that RAIDS significantly outperforms state-of-the-art IDS without using road context by up to 99.9% accuracy and short response time.