 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWholeBodyVLA: Towards Unified Latent VLA for Whole-Body Loco-Manipulation Control
Dec 15, 2025Humanoid robots require precise locomotion and dexterous manipulation to perform challenging loco-manipulation tasks. Yet existing approaches, modular or end-to-end, are deficient in manipulation-aware locomotion. This confines the robot to a limited workspace, preventing it from performing large-space loco-manipulation. We attribute this to: (1) the challenge of acquiring loco-manipulation knowledge due to the scarcity of humanoid teleoperation data, and (2) the difficulty of faithfully and reliably executing locomotion commands, stemming from the limited precision and stability of existing RL controllers. To acquire richer loco-manipulation knowledge, we propose a unified latent learning framework that enables Vision-Language-Action (VLA) system to learn from low-cost action-free egocentric videos. Moreover, an efficient human data collection pipeline is devised to augment the dataset and scale the benefits. To execute the desired locomotion commands more precisely, we present a loco-manipulation-oriented (LMO) RL policy specifically tailored for accurate and stable core loco-manipulation movements, such as advancing, turning, and squatting. Building on these components, we introduce WholeBodyVLA, a unified framework for humanoid loco-manipulation. To the best of our knowledge, WholeBodyVLA is one of its kind enabling large-space humanoid loco-manipulation. It is verified via comprehensive experiments on the AgiBot X2 humanoid, outperforming prior baseline by 21.3%. It also demonstrates strong generalization and high extensibility across a broad range of tasks.
Loop-Closure Detection Based on 3D Point Cloud Learning for Self-Driving Industry Vehicles
Apr 30, 2019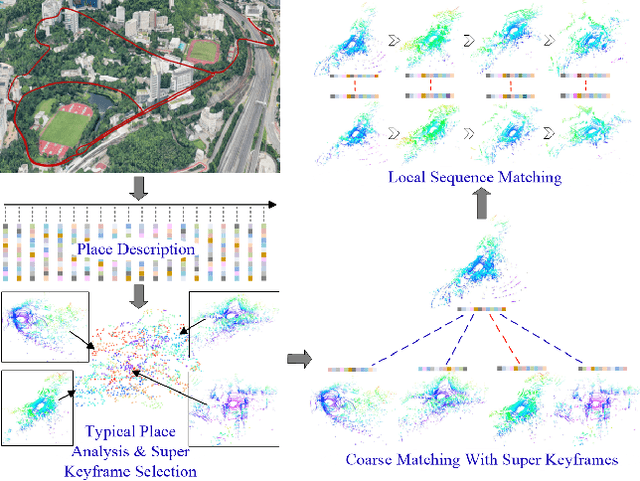

Self-driving industry vehicle plays a key role in the industry automation and contributes to resolve the problems of the shortage and increasing cost in manpower. Place recognition and loop-closure detection are main challenges in the localization and navigation tasks, specially when industry vehicles work in large-scale complex environments, such as the logistics warehouse and the port terminal. In this paper, we resolve the loop-closure detection problem by developing a novel 3D point cloud learning network, an active super keyframe selection method and a coarse-to-fine sequence matching strategy. More specifically, we first propose a novel deep neural network to extract a global descriptors from the original large-scale 3D point cloud, then based on which, an environment analysis approach is presented to investigate the feature space distribution of the global descriptors and actively select several super keyframes. Finally, a coarse-to-fine sequence matching strategy, which includes a super keyframe based coarse matching stage and a local sequence matching stage, is presented to ensure the loop-closure detection accuracy and real-time performance simultaneously. The proposed network is evaluated in different datasets and obtains a substantial improvement against the state-of-the-art PointNetVLAD in place recognition tasks. Experiment results on a self-driving industry vehicle validate the effectiveness of the proposed loop-closure detection algorithm.
3D Point Cloud Learning for Large-scale Environment Analysis and Place Recognition
Dec 11, 2018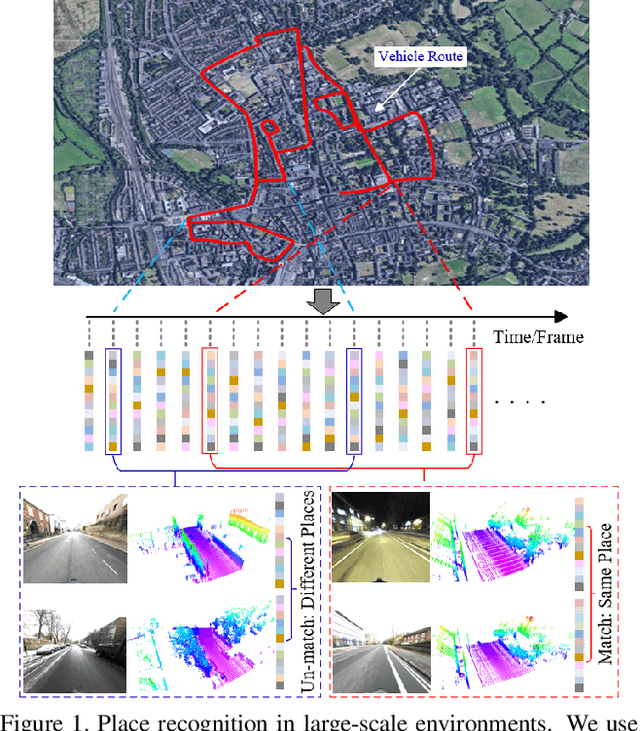
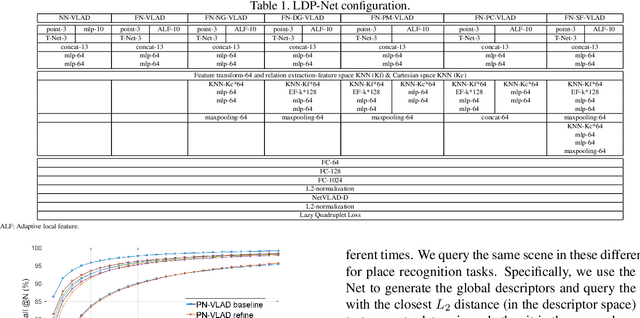
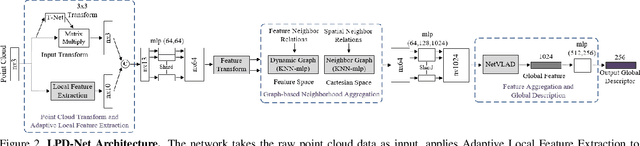
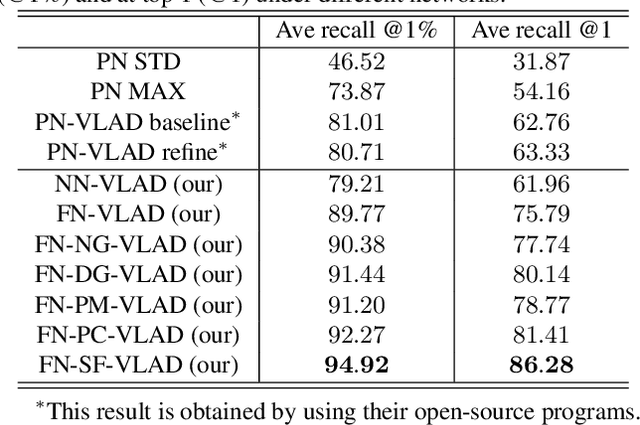
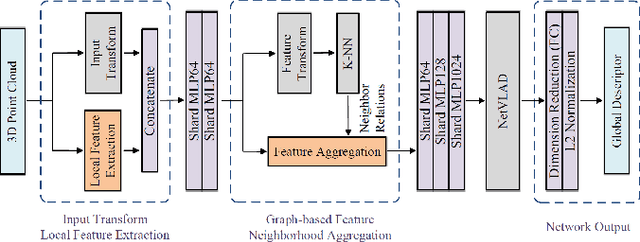
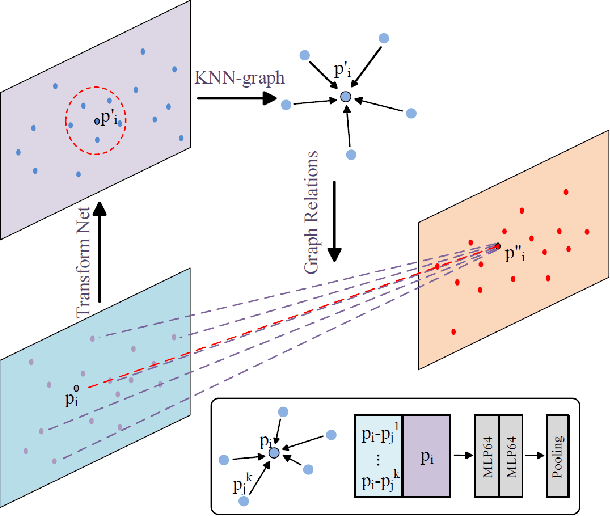
In this paper, we develop a new deep neural network which can extract discriminative and generalizable global descriptors from the raw 3D point cloud. Specifically, two novel modules, Adaptive Local Feature Extraction and Graph-based Neighborhood Aggregation, are designed and integrated into our network. This contributes to extract the local features adequately, reveal the spatial distribution of the point cloud, and find out the local structure and neighborhood relations of each part in a large-scale point cloud with an end-to-end manner. Furthermore, we utilize the network output for point cloud based analysis and retrieval tasks to achieve large-scale place recognition and environmental analysis. We tested our approach on the Oxford RobotCar dataset. The results for place recognition increased the existing state-of-the-art result (PointNetVLAD) from 81.01% to 94.92%. Moreover, we present an application to analyze the large-scale environment by evaluating the uniqueness of each location in the map, which can be applied to localization and loop-closure tasks, which are crucial for robotics and self-driving applications.